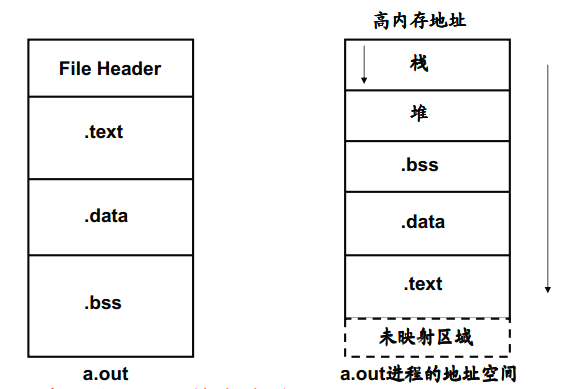
一、映像文件基本組成映像文件加載時域包括RO和RW段,運行時域則包括RO、RW和ZI三個段。其中RO和RW段的
內容在
加載時和運行時是一樣的,只是存儲空間可能不同,
而ZI段則是運行時由初始化函數創建的。
RO段:Read-Only段,包括源程序中的
CODE段,
只讀數據段(包括變量的初始化
值——可以是任意變量,全局/局部、靜態/動態變量的初值;還包括數據常量——這個常量也可以是全局的或局部的。也就是說,編譯器既要為
變量分配存儲空間——變量是可讀寫的,並不放在RO段,又要為
變量的初值分配存儲空間,兩者是兩回事)。
RW段:
可讀寫段,主要指RW-DATA,也可能有RW-CODE。RW-DATA是指已經
初始化的全局變量。ZI段:Zero-Initialized段,主要包括未初始化的全局變量,編譯器用0值對其進行初始化。該段中的數據由於是變量,因而也是可讀寫的,但在映像文件加載時,並不為ZI段分配存儲空間,雖然在ADS編譯器的Memory map文件中認為Total RW Size = (RW Data + ZI Data)。
二、代碼,數據和變量在映像文件中的位置上面簡單總結了映像文件各段的組成。從程序的組成看,可以分為變量、數據和代碼,其中變量又分為全局/局部的或靜態/動態的,它們的存儲空間又是如何分配的呢?
代碼:一般是只讀的,由編譯器分配存儲空間並放到映像文件的RO段。
數據:這裡所指的數據都是常量(若可變則為變量),也包括
指針常量,那麼也
屬於只讀的數據,也由編譯器分配存儲空間放到映像文件的RO段。
變量:主要根據生存期來分,因為生存期是按在內存中的生存時間來定義的,而作用域與存儲空間分配無關。
1.全局變量和靜態變量:包括靜態局部變量和全局/靜態指針變量在內,由編譯器分配存儲空間,已初始化的放到RW段,否則放到ZI段;
2.動態變量:主要是指局部變量,包括局部指針變量,函數參數,返回值等在內,占用棧空間。
三、啟動過程中的堆棧初始化釋疑堆與棧:對於ARM,堆是向上生長的,棧是向下生長的。
局部變量占用棧(stack)空間(但其初始化值為數據,占用RO空間);
程序中動態申請的如malloc()和new函數申請的內存空間占用堆(heap)空間。
————×以下討論不使用semihosting機制×————
因此,在轉入C應用程序前,必須要為C程序准備堆棧空間。根據具體的目標平台的存儲器資源,要對堆棧的初始化函數__user_initial_stackheap( )進行移植,主要是正確設置堆(heap)和棧(stack)的地址。它可以使用C或ARM匯編語言來編寫,並至少返回堆基址(保存在R0中),棧基址(保存在R1)可選。因而一個簡單的匯編語言編寫的__user_initial_stackheap( )函數如下:
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDRR0, =0x20000 ;heap base
LDRR1, =0x40000 ;stack base, optional
MOV PC, R14
注意,如果在工程中沒有自定義這個函數,那麼缺省情況下,編譯器/鏈接器會把|Image$$ZI$$Limit|作為堆(heap)的基址(即把heap和stack區放置在ZI區域的上方,這也被認為是標准的實現[7])。但是,如果使用scatter文件實現分散加載機制,鏈接器並不生成符號|Image$$ZI$$Limit|,這時就必須自己重新實現__user_initial_stackheap( )函數並且設置好堆基址和棧頂,否則鏈接時會報錯。
堆棧區還分為單區模型和雙區模型,在雙區模型中,還必須設置堆棧限制[4,6,7]。
關於重定義__user_initial_stackheap( )函數時幾點要注意的地方:一是不要使用超過96字節的stack,二是不要影響到R12(IP,用作進程間調用的暫存寄存器),三是按規則返回參數值(R0:heap base;R1:stack base;R2:heap limit;R3:stack limit),四是讓堆區保持8字節對齊[6]。
在啟動代碼中,還要對各個處理器模式的棧指針進行初始化。這個問題很容易與上面談到的__user_initial_stackheap()函數的作用相混淆。可從以下幾點來加以說明:
(1)在嵌入式應用中,啟動代碼分為兩個部分:一是系統的初始化,包括中斷向量表的建立、時鐘、存儲系統初始化、關鍵I/O口初始化、各處理器模式下的棧指針初始化等;二是應用程序初始化(或說C庫函數初始化),包括RW段的搬移和ZI段的清零、C應用程序堆棧區的建立(__user_initial_stackheap()函數初始化堆棧指針)等。
從這個意義上說,兩者並沒有直接關系。
(2)但兩者並不是沒有聯系的。以單區模型的堆棧區為例,由於棧是向下生長的,堆是向上生長的,系統模式的棧指針(與用戶模式相同,共用一個R13寄存器來描述)實際上定義了用戶模式下單區模型堆棧區的上限,而__user_initial_stackheap()函數中指定的heap基址則成為該堆棧區的下限。
因此,如果之前已經對系統模式(用戶模式)的棧指針進行了初始化,則在重定義__user_initial_stackheap()函數時,就不需要重新定義stack base了。
四、啟動代碼的內容和初始化順序探討前面已經指出,啟動代碼包括系統初始化以及應用程序運行環境的初始化兩個部分,完成初始化後,就可以呼叫用戶主程序了。參考資料[1]、[3]和[5]等都對兩個部分的內容以及過程列出了非常清晰但又簡單明了的步驟,這對於初學者來說稍微有點抽象。
如果不需要使用MMU進行地址重映射,那麼,結合網上可以搜集的示例boot代碼以及分析文檔,加上自己動手移植和調試,也是比較容易理解的。如果是使用處理器自帶的Remap控制寄存器來進行地址重映射,網上也有相關的代碼,例如網友twentyone的boot代碼【4510 bootloader的實現與分析(附源代碼)】就非常清楚,另外,在《ARM學習報告》系列文章中也對其有詳細的分析。
對於在啟動過程中要使用MMU進行地址重映射的系統初始化順序,在《使用AXD調試MMU地址映射程序手記(二)》一文中給出了一個參考步驟,並做了一定的說明。通過進一步參考權威資料,這裡,對系統初始化順序作了小的改進與修正如下:
①禁止所有中斷→②初始化時鐘→③初始化存儲器→④初始化各模式下的棧指針→⑤初始化GPIO→⑥拷貝映像文件到SDRAM→⑦建立地址重映射表→⑧使能MMU→⑨應用程序初始化(RW&ZI區)→⑩使能異常中斷→⑾呼叫主程序(dummyOS)。
主要對使能異常中斷和應用程序初始化的順序做了調整,即先進行應用程序的初始化,再使能異常中斷。
......