摘要:狀態機模式是一種行為模式,在《設計模式》這本書中對其有詳細的描述,通過多態實現不同狀態的調轉行為的確是一種很好的方法,只可惜在嵌入式環境下,有時只能寫純C代碼,並且還需要考慮代碼的重入和多任務請求跳轉等情形,因此實現起來著實需要一番考慮。本文主要為你實現一個簡單的有限狀態機,沒有考慮代碼的重入和多任務跳轉,為以後復雜的狀態機實現,打下基礎。
本文來源:用C語言實現有限狀態自動機FSM
一、狀態機實現的要素
首先,分析一下一個普通的狀態機究竟要實現哪些內容。
狀態機存儲從開始時刻到現在的變化,並根據當前輸入,決定下一個狀態。這意味著,狀態機要存儲狀態、獲得輸入(我們把它叫做跳轉條件)、做出響應。
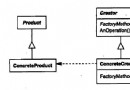
如上圖所示,{s1, s2, s3}均為狀態,箭頭c1/a1表示在s1狀態、輸入為c1時,跳轉到s2,並進行a1操作。
最下方為一組輸入,狀態機應做出如下反應:
當前狀態 輸入 下一個狀態 動作
s1 c1 s2 a1
s2 c2 s3 a2
s3 c1 s2 a3
s2 c2 s3 a2
s3 c1 s2 a3
s2 c1 s_trap a_trap
s_trap c1 s_trap a_trap
當某個狀態遇到不能識別的輸入時,就默認進入陷阱狀態,在陷阱狀態中,不論遇到怎樣的輸入都不能跳出。
為了表達上面這個自動機,我們定義它們的狀態和輸入類型:
typedef int state;
typedef int condition;
#define
STATES 4
#define
STATE1 0
#define
STATE2 1
#define
STATE3 2
#define
STATETRAP 3
#define
CONDITIONS 2
#define
CONDITION1 0
#define
CONDITION2 1
總結一下,我們需要定義的有狀態、輸入、行為(動作+下一個狀態),其中,行為的個數是“狀態數*輸入數量”(其中有一些是重復的);其中動作一般來說可以用一個函數指針來實現。
二、具體設計
在嵌入式環境中,由於存儲空間比較小,因此把它們全部定義成宏。此外,為了降低執行時間的不確定性,我們使用O(1)的跳轉表來模擬狀態的跳轉。
首先定義跳轉類型:
typedef void (*actiontype)(state
mystate, condition condition);
typedef struct
{
state
next;
actiontype
action;
}
trasition, * ptrasition;
然後按照上圖中的跳轉關系,把三個跳轉加一個陷阱跳轉先定義出來:
//
(s1, c1, s2, a1)
trasition
t1 = {
STATE2,
action1
};
//
(s2, c2, s3, a2)
trasition
t2 = {
STATE3,
action2
};
//
(s3, c1, s2, a3)
trasition
t3 = {
STATE2,
action3
};
//
(s, c, trap, a1)
trasition
tt = {
STATETRAP,
actiontrap
};
其中的動作,由用戶自己完成,在這裡僅定義一條輸出語句。
1
2
3
4
void action1(State
state, Condition condition)
{
printf("Action
1 triggered.\n");
}
1
最後定義跳轉表:
asition
transition_table[STATES][CONDITIONS] = {
/*
c1, c2*/
/*
s1 */&t1,
&tt,
/*
s2 */&tt,
&t2,
/*
s3 */&t3,
&tt,
/*
st */&tt,
&tt,
};
即可表達上文中的跳轉關系。
最後定義狀態機,如果不考慮多任務請求,那麼狀態機僅需要存儲當前狀態便行了。例如:
typedef struct
{
State
current;
}
StateMachine, * pStateMachine;
State
step(pStateMachine machine, Condition condition)
{
pTrasition
t = transition_table[machine->current][condition];
(*(t->action))(machine->current,
condition);
machine->current
= t->next;
return machine->current;
}
總結:我們現在設計實現好了一個狀態機,然後要給這個狀態機特定的輸入,看看狀態機的運轉情況,以上面圖中的那個狀態機為例,我們輸入的序列是0和1分別代表c1和C2,然後狀態s1,s2分別對應0,1.用程序實現這個內容如下
三、程序實現
程序清單:小型狀態機的實現
[cpp
#include<stdio.h>
#include<unistd.h>
#include<stdlib.h>
typedef int state;
typedef int condition;
#define STATENUM 4
#define STATE1 0
#define STATE2 1
#define STATE3 2
#define STATETRAP 3
#define CONDITIONS 2
#define CONDITION1 0
#define CONDITION2 1
typedef void (* actiontype)(state mystate,condition mycondition);
typedef struct{
state next;
actiontype action;
}trasition, *ptrasition;
void action1(state mystate,condition myconditon);
void action2(state mystate,condition myconditon);
void action3(state mystate,condition myconditon);
void actiontrap(state mystate,condition myconditon);
trasition t1={
STATE2,action1
};
trasition t2={
STATE3,action2
};
trasition t3={
STATE2,action3
};
trasition tt={
STATETRAP,actiontrap
};
void action1(state mystate,condition myconditon){
printf("action1 one triggered\n");
}
void action2(state mystate,condition myconditon){
printf("action2 one triggered\n");
}
void action3(state mystate,condition myconditon){
printf("action3 one triggered\n");
}
void actiontrap(state mystate,condition myconditon){
printf("actiontrap one triggered\n");
}
ptrasition transition_table[STATENUM][CONDITIONS] = {
/* c1, c2*/
/* s1 */&t1, &tt,
/* s2 */&tt, &t2,
/* s3 */&t3, &tt,
/* st */&tt, &tt,
};
typedef struct
{
state current;
} StateMachine, * pStateMachine;
state step(pStateMachine machine, condition mycondition)
{
ptrasition t = transition_table[machine->current][mycondition];
(*(t->action))(machine->current, mycondition);
machine->current = t->next;
printf("the current state is %d\n",t->next );
return machine->current;
}
int main(int argc, char *argv[])
{
StateMachine mymachine;
mymachine.current=STATE1;
int mycon;
char ch;
while(1){
scanf("%d",&mycon);
step(&mymachine,mycon);
}
return 0;
}