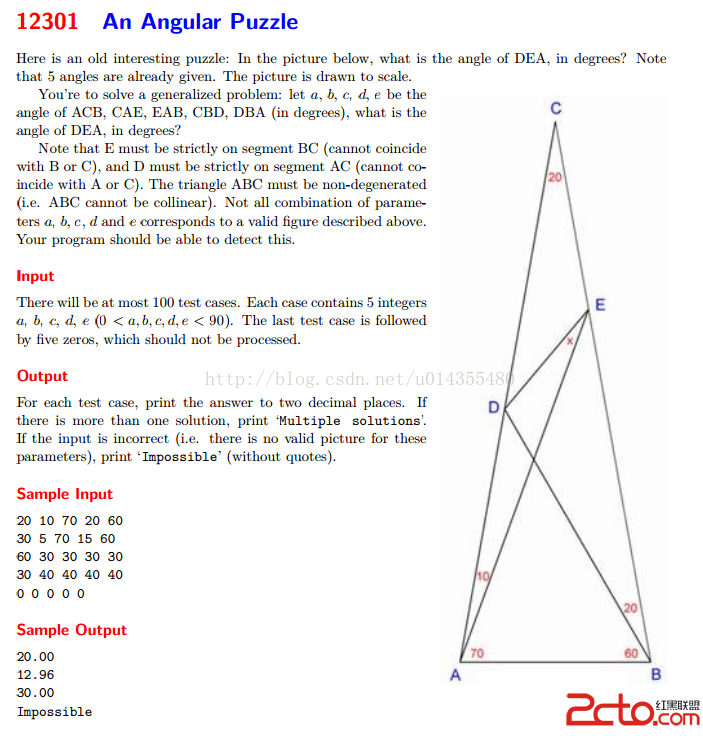
思路:可以先確定A,B的坐標,然後再通過確定向量來硬算出角度。。好像可以推公式做,沒推出來╮(╯_╰)╭
AC代碼:
#include#include #include #include #include using namespace std; const double PI = 4 * atan(1.0); struct Point { double x, y; Point(double x = 0, double y = 0) : x(x) , y(y) { } }; typedef Point Vector; Vector operator + (Vector A, Vector B) { return Vector(A.x+B.x, A.y+B.y); } Vector operator - (Vector A, Vector B) { return Vector(A.x-B.x, A.y-B.y); } Vector operator * (Vector A, double p) { return Vector(A.x*p, A.y*p); } Vector operator / (Vector A, double p) { return Vector(A.x/p, A.y/p); } bool operator < (const Point& a, const Point& b) { return a.x < b.x || (a.x == b.x && a.y < b.y); } const double eps = 1e-10; int dcmp(double x) { if(fabs(x) < eps) return 0; else return x < 0 ? -1 : 1; } bool operator == (const Point& a, const Point& b) { return dcmp(a.x - b.x) == 0 && dcmp(a.y - b.y) == 0; } double Dot(Vector A, Vector B) { return A.x*B.x + A.y*B.y; } double Length(Vector A) { return sqrt(Dot(A, A)); } double Angle(Vector A, Vector B) { return acos(Dot(A, B) / Length(A) / Length(B)); } double Cross(Vector A, Vector B) { return A.x*B.y - A.y*B.x; } double Area2(Point A, Point B, Point C) { return Cross(B-A, C-A); } Vector Rotate(Vector A, double rad) { return Vector(A.x*cos(rad) - A.y*sin(rad), A.x*sin(rad)+A.y*cos(rad) ); } Vector Normal(Vector A) { double L = Length(A); return Vector(-A.y/L, A.x/L); } Point GetLineIntersection(Point P, Vector v, Point Q, Vector w) { Vector u = P - Q; double t = Cross(w, u) / Cross(v, w); return P + v * t; } double DistanceToLine(Point P, Point A, Point B) { Vector v1 = B-A, v2 = P - A; return fabs(Cross(v1,v2) / Length(v1)); } double DistanceToSegment(Point P, Point A, Point B) { if(A==B) return Length(P-A); Vector v1 = B - A, v2 = P - A, v3 = P - B; if(dcmp(Dot(v1, v2)) < 0) return Length(v2); else if(dcmp(Dot(v1, v3)) > 0) return Length(v3); else return fabs(Cross(v1, v2)) / Length(v1); } Point GetLineProjection(Point P, Point A, Point B) { Vector v = B - A; return A + v * ( Dot(v, P-A) / Dot(v, v) ); } bool SegmentProperIntersection(Point a1, Point a2, Point b1, Point b2) { double c1 = Cross(a2 - a1, b1 - a1), c2 = Cross(a2 - a1, b2 - a1), c3 = Cross(b2 - b1, a1 - b1), c4 = Cross(b2 - b1, a2 - b1); return dcmp(c1) * dcmp(c2) < 0 && dcmp(c3) * dcmp(c4) < 0; } bool OnSegment(Point p, Point a1, Point a2) { return dcmp(Cross(a1 - p, a2 - p)) == 0 && dcmp(Dot(a1 - p, a2 - p)) < 0; } double ConvexPolygonArea(Point* p, int n) { double area = 0; for(int i = 1; i < n-1; i++) area += Cross(p[i] - p[0], p[i + 1] - p[0]); return area / 2; } int main() { double a, b, c, d, e; while(scanf("%lf %lf %lf %lf %lf", &a, &b, &c, &d, &e) != EOF && a) { if(dcmp(a + b + c + d + e - 180) != 0) { printf("Impossible\n"); continue; } a = a / 180 * PI; b = b / 180 * PI; c = c / 180 * PI; d = d / 180 * PI; e = e / 180 * PI; Point A = Point(0,0); Point B = Point(1,0); Vector AC = Vector(1,tan(b+c)); Vector BC = Vector(1,-tan(d+e)); Vector AE = Vector(1,tan(c)); Vector BD = Vector(1,-tan(e)); Point E = GetLineIntersection(A, AE, B, BC); Point D = GetLineIntersection(A, AC, B, BD); double ans = Angle(D-E, A-E); printf("%.2lf\n", ans / PI * 180); } return 0; }