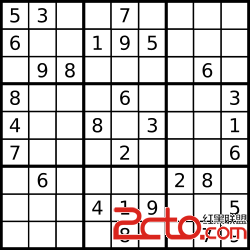
題目大意:給出一張網格圖,描述了每個點是否是加油站,然後給出以下規則。
1.油量限制,一次加油之後只能行駛k步,向下行駛和向右行駛的時候不增加花費,否則增加B的花費。
2.在沒油的時候,若該點沒有加油站,就建立一個加油站。花費C。
3.加油花費A。
思路:分層圖。f[i][j][k]表示在(i,j)處油箱中還有k的油的時候的最小花費,然後分三種情況更新。
(delta = 往回走的B花費)
1.若當前節點有加油站,就必須加油。到下一個節點是還有k - 1的油量,花費last + A + delta
2.如果當前節點沒有加油站,若當前車裡還有油,就繼續向下更新,花費last + delta
3.如果當前節點沒有加油站,若當前車裡沒有油,就新建一個加油站,花費last + A + C + delta
CODE:
#include#include #include #include #include #define MAX 110 #define INF 0x3f3f3f3f using namespace std; const int dx[5] = {0,1,0,-1,0}; const int dy[5] = {0,0,1,0,-1}; struct Complex{ int x,y,odd; Complex(int _,int __,int ___):x(_),y(__),odd(___) {} Complex() {} }; int cnt,k,add_oil,back_cost,new_cost; int f[MAX][MAX][20]; bool v[MAX][MAX][20],map[MAX][MAX]; void SPFA(); int main() { cin >> cnt >> k >> add_oil >> back_cost >> new_cost; for(int i = 1;i <= cnt; ++i) for(int j = 1;j <= cnt; ++j) scanf("%d",&map[i][j]); SPFA(); int ans = INF; for(int i = 0;i <= k; ++i) ans = min(ans,f[cnt][cnt][i]); cout << ans << endl; return 0; } void SPFA() { memset(f,0x3f,sizeof(f)); f[1][1][k] = 0; static queue q; while(!q.empty()) q.pop(); q.push(Complex(1,1,k)); while(!q.empty()) { Complex now = q.front(); q.pop(); int last = f[now.x][now.y][now.odd]; v[now.x][now.y][now.odd] = false; for(int i = 1;i <= 4; ++i) { int detla = (i > 2) * back_cost; int fx = now.x + dx[i]; int fy = now.y + dy[i]; if(!fx || !fy || fx > cnt || fy > cnt) continue; if(map[now.x][now.y]) { if(f[fx][fy][k - 1] > last + add_oil + detla) { f[fx][fy][k - 1] = last + add_oil + detla; if(!v[fx][fy][k - 1]) v[fx][fy][k - 1] = true,q.push(Complex(fx,fy,k - 1)); } } else { if(!now.odd) { if(f[fx][fy][k - 1] > last + add_oil + new_cost + detla) { f[fx][fy][k - 1] = last + add_oil + new_cost + detla; if(!v[fx][fy][k - 1]) v[fx][fy][k - 1] = true,q.push(Complex(fx,fy,k - 1)); } } else { if(f[fx][fy][now.odd - 1] > last + detla) { f[fx][fy][now.odd - 1] = last + detla; if(!v[fx][fy][now.odd - 1]) v[fx][fy][now.odd - 1] = true,q.push(Complex(fx,fy,now.odd - 1)); } } } } } }