這道題是比較典型的動態規劃的題目。模型簡單,但是可以考核動態規劃的思想。
我們先說說brute force的解法,比較容易想到用遞歸,到達某一格的路徑數量等於它的上面和左邊的路徑數之和,結束條件是走到行或者列的邊緣。因為每條路徑都會重新探索,時間復雜度是結果數量的量級,不是多項式的復雜度。代碼如下:
public int uniquePaths(int m, int n) {
return helper(1,1,m,n);
}
private int helper(int row, int col, int m, int n)
{
if(row==m && col==n)
return 1;
if(row>m || col>n)
return 0;
return helper(row+1,col,m,n)+helper(row,col+1,m,n);
}
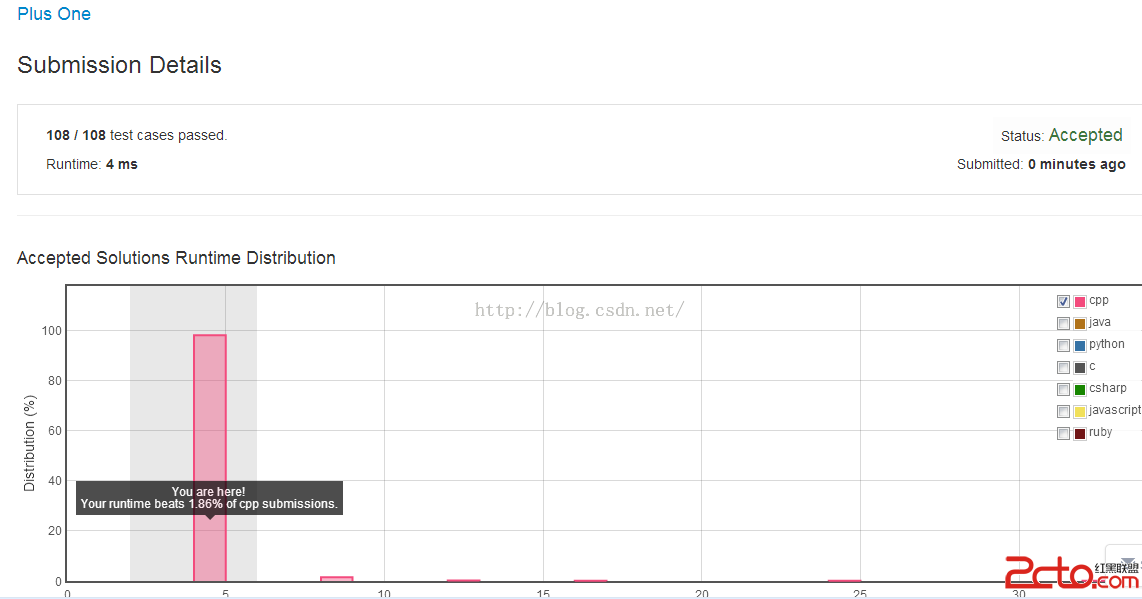
上面的代碼放到LeetCode中跑會超時,因為不是多項式量級的。其實上一步中遞推式已經出來了,就是res[i][j]=res[i-1][j]+res[i][j-1],這樣我們就可以用一個數組來保存歷史信息,也就是在i行j列的路徑數,這樣每次就不需要重復計算,從而降低復雜度。用動態規劃我們只需要對所有格子進行掃描一次,到了最後一個得到的結果就是總的路徑數,所以時間復雜度是O(m*n)。而對於空間可以看出我們每次只需要用到上一行當前列,以及前一列當前行的信息,我們只需要用一個一維數組存上一行的信息即可,然後掃過來依次更替掉上一行對應列的信息即可(因為所需要用到的信息都還沒被更替掉),所以空間復雜度是O(n)(其實如果要更加嚴謹,我們可以去行和列中小的那個,然後把小的放在內層循環,這樣空間復雜度就是O(min(m,n)),下面的代碼為了避免看起來過於繁雜,就不做這一步了,有興趣的朋友可以實現一下,比較簡單,不過代碼有點啰嗦)。實現的代碼如下:
public int uniquePaths(int m, int n) {
if(m<=0 || n<=0)
return 0;
int[] res = new int[n];
res[0] = 1;
for(int i=0;i上面的方法用動態規劃來求解,如果我們仔細的看這個問題背後的數學模型,其實就是機器人總共走m+n-2步,其中m-1步往下走,n-1步往右走,本質上就是一個組合問題,也就是從m+n-2個不同元素中每次取出m-1個元素的組合數。根據組合的計算公式,我們可以寫代碼來求解即可。代碼如下:public int uniquePaths(int m, int n) {
double dom = 1;
double dedom = 1;
int small = m上面的代碼求解了組合的結果,只需要做一次行或者列的掃描,所以時間復雜度是O(min(m,n)),而空間復雜度是O(1)。比起上面的兩種解法更優。不過這裡有個弊端,就是如果代碼中的dom和dedom如果不是double,而是用int,那麼會很容易越界,因為這是一個階乘,所以大家在面試中討論這種方法要注意和提及越界的問題。
上面介紹了幾種方法來求解這個問題,其實都是比較簡單的模型,只是提供了不同的思路。Unique
Paths II是這道題的擴展,給機器人增加了障礙,有興趣的朋友可以聯系一下。