淺談C說話編程中法式的一些根本的編寫優化技能。本站提示廣大學習愛好者:(淺談C說話編程中法式的一些根本的編寫優化技能)文章只能為提供參考,不一定能成為您想要的結果。以下是淺談C說話編程中法式的一些根本的編寫優化技能正文
年夜概一切進修C說話的初學者,都被先輩說過,C說話是世界上接近最速的編程說話,固然這其實不是吹法螺,也其實不是抬高其他說話,固然非C說話能寫出高速度的代碼,然則C說話更輕易寫出高速的法式(高速不代表高效),但是再好的對象,在門外漢手中也只能是暗淡衰敗。
關於古代編譯器,古代CPU而言,我們要盡可能逢迎CPU的設計(好比架構和處置指令的方法等),固然編譯器是為法式員辦事,而且在盡它最年夜的才能來優化法式員寫出的代碼,然則究竟它還沒有離開電子的領域,假如我們的代碼不克不及讓編譯器懂得,編譯器沒法幫我們優化代碼,那末我們就沒法寫出一個高速的法式。
關於此,我們可以暫且疏忽CPU的設計,由於我們在層面上只能斟酌若何逢迎編譯器的優化規矩,而CPU則是說話和編譯器的工作了。
進步法式的速度,就C說話而言可以有這幾種辦法:
起首照樣要設計公道的年夜綱,正所謂一個法式最年夜的機能晉升就是它第一次運轉的時刻
要防止持續的函數挪用。
注:跟著編譯器的版本更新,即便不開啟優化選項,自帶的編譯器優化照舊可以或許為我們編寫的代碼供給一部門優化,這就是不應用老版本編譯器的緣由,固然作為一個法式員不該該太依附於編譯器,然則我以為,時期在提高,信息量正在無窮的收縮,然則人類的年夜腦和精神在一個年夜時期內是無限的,換句話說關於通俗人而言我們的記憶是無限的,我們不該該把精神放在後人曾經做完的工作上,而是要站在偉人的肩膀上向更遠處遠望,如斯我們應當充足應用對象來贊助我們完成一些既有的功效,而法式員應當更 專注於發明新的思緒,和設法主意,在圖靈測試還沒有有人打破之前,法式員依附編譯器其實不是一件毛病的工作。
關於當下的編譯器,以GCC(GCC不只僅是一個編譯器,但這裡將它當做編譯器的代名詞)為例,-O2是一個為年夜眾所接收的優化品級,關於其他編譯器,普通法式員可以選擇應用由Google和Apple結合開辟的編譯器clang也是一個很好的選擇, 在-O2的優化品級下,GCC普通情形下可以或許主動履行輪回睜開優化,
開端.
/*struct.h*/
#include <stdio.h>
typedef struct me{
int value;
struct me* next;
}data_t;
typedef struct{
int index;
data_t* storage;
}block;
為了測試便利我們起首界說了兩個構造體,分離是:
block代表一個塊,每一個塊都有一個序號(int),一個數據域data_t
data_t代表一個數據域,原型是一個鏈表,每一個data_t對象中包括一個數據和一個指針。
/*main.c*/
#include "struct.h"
#define ARR_SIZE 10
static inline int get_len(const data_t* data)
{
int len = 0;
if(!data)
fprintf(stderr,"The data in %p is NULL\n",data);
else
while(!data->next)
{
++len;
data = data->next;
}
return len;
}
static inline void mix_cal(const block* process, int result[])
{
for(int i = 0;i < get_len(process->storage);++i)
{
*result += (process->storage)[i];
}
}
此時我們獲得了兩個測試函數,get_len和mix_cal分離用來獲得data_t長度,和盤算數據域的總和。
/*main.c*/
int main(void)
{
block* block_in_all[ARR_SIZE] = { NULL };
int result_in_all[ARR_SIZE] = { 0 };
/*
* 假定生成了很多的`block`類型對象
* 將很多的`block`放置在一個數組中,每一個元素類型為`block*`
* 每一個block對象中都包括非空的data_t類型的數據域
*/
for(int i = 0;i < ARR_SIZE;++i)
{
mix_cal(block_in_all[i], result_in_all+i);
}
for(int i = 0;i < ARR_SIZE;++i)
{
printf("The %dth block have the total %d data\n",
block_in_all[i]->index, result_in_all[i]);
}
return 0;
}
耐煩讀完上述的代碼,它是用來乞降的,求一個域中的一切元素的和。細心剖析一下,很輕易就可以看見一些缺陷,最年夜的莫過於在mix_cal函數中關於get_len函數的挪用,在此處看來非常顯著,然則我們在編寫法式的時刻能否可以或許留意到這個成績呢?
關於一些不用要的函數挪用我們要做的就是將他們提掏出來,應用暫時變量是一個很好的方法,由於在編譯器的贊助下暫時變量在許可的情形下可以或許充足的應用CPU的存放器。之所所以許可的情形下,是由於存放器的數目其實不多,而編譯器在存放器的應用上須要斟酌很多的龐雜身分,故其實不是每次應用暫時變量都能參加存放器。但這其實不妨害我們晉升法式的機能。
在此處,我們應當將for輪回中的斷定語句裡的get_len函數提掏出來,在內部應用一個暫時變量吸收成果,而不是在輪回中一向挪用該函數。
int len = get_len(process->storage);
.
照舊是上方的代碼,我們來說述一下,輪回睜開。
關於mix_cal函數,我們或許說編譯器可以若何晉升它的速度呢?我們說過一點的小轉變都能夠對一個法式的終究代碼發生極年夜的影響,對此最經常使用的就是測驗考試,後人之路早已鋪好,不須要反復造輪子了。
輪回睜開:
int reality = len - 1, i;
for(i = 0;i < reality;i+=2)
{
*result = *result + (process->storage)[i]
+ (process->storage)[i+1];
}
for(;i < len;++i)
{
*result += (process->storage)[i];
}
這就是輪回睜開中的2次輪回睜開,異樣還有n次輪回睜開。
異樣,在適才提到過存放器的應用和削減不用要的開支,在此法式中關於(process->storage)[i]如許的存儲器地位解援用太甚糟蹋,我們老是將其優化本錢低暫時變量的應用
data* local_data = process->storage;
這將為法式帶來非常可不雅的勤儉,固然這些任務在編譯器的優化中都能包含,然則一旦我們的代碼難以被編譯器所懂得(固然編譯器的進級最年夜的目標就是晉升優化後果),那末我們極可能獲得一特性能不敷可不雅的法式。所以當我們其實不是特殊緊湊的時刻,可以將這些任務當做我們的天職來做,而不是交給編譯器來做。
和關於內部存儲地位 result 我們在此處也是存在著糟蹋,異樣我們應當應用一個暫時變量來存儲總和,而不是每次獲得成果便對它停止解援用操作。
int local_result = 0; /*...*/ local_result = local_result + local_data[i] + local_data[i+1]; /*...*/ *result = local_result;
在上方我們可以看見輪回睜開被稱作2次輪回睜開,那末天然可以揣摸有n次輪回睜開,天然是有的,關於一個n次輪回睜開的式子我們有一個輕便的上界肯定公式即:
reality = len - n + 1;
至於睜開幾回最好,仍然是視情況而定。 故終究的版本應當為:
static inline void mix_cal(const block* process, int result[])
{
int local_result = 0;
int len = get_len(process->storage);
int reality = len - 1, i;
data* local_data = process->storage;
for(i = 0;i < reality;i+=2)
local_result += local_data[i] + local_data[i+1];
for(;i < len;++i)
local_result += local_data[i];
*result = local_result;
}
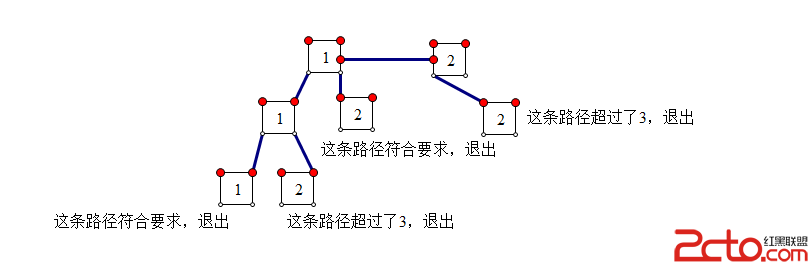
說明:輪回睜開將元素相加分為兩個部門,第一部門每次加兩個元素,因為如斯做會殘剩元素沒有加,故在第二部門將剩下的元素都加起來。
. 還有一種叫做從新組合的技能,即為讓一個表達式中的運算數自在組合,組合出最疾速的一種,然則這類辦法不曾實驗過。故不說起。
. 關於前提分支猜測毛病形成的時光消耗,稱之為處分,最淺顯的說法,就是當你編寫的代碼中含有前提分支的時刻,處置器會選擇去預判某一個分支是此次准確的歧路,如許可以免修正任何現實的存放器和存儲器,一向到肯定了現實成果,如果纰謬,那就慘了,這段時光做的工作都空費了。然則也不用過火的關懷這類前提分支的猜測,這也是我放在最初說的意義地點。
這裡有兩種較為客不雅的辦法,一種被稱為敕令式,一種被稱為功效式
敕令式:
for(int i = 0;i < n;++i)
{
if(a[i] > b[i]){
int temp = a[i];
a[i] = b[i];
b[i] = temp;
}
}
功效式:
int min, max;
for(int i = 0;i < n;++i)
{
min = a[i] < b[i] ? a[i] : b[i];
max = a[i] < b[i] ? b[i] : a[i];
a[i] = min;
b[i] = max;
}
很清楚的一個例子,顯著看出來,前者關於分歧情形所作的法式步數顯著分歧,爾後者不管甚麼情形都是雷同的法式步。
兩個情勢的利益前者關於可猜測數據來講,是一個很好的模子,後者則是不偏不倚,甚麼是可猜測弗成猜測,好比一個數是正數照樣負數這就是弗成猜測的,用後面誰人代碼會有很年夜的處分。
. 多路並行的技能也是一個很主要的思緒,能夠在許多人眼中看來,兩條語句順次寫出和歸並的後果必定是一樣。然則多路並行有一個缺陷就是對存放器的數目有所請求,當存放器不敷時(稱為溢出),機能不升反降。異樣是關於輪回睜開,此次應用四次輪回睜開加二路並行:
for(i = 0;i < reality;i+=4){
local_result_1 += local_data[i] + local_data[i+1];
local_result_2 += local_data[i+2] + local_data[i+3];
}//也能夠分紅四路並行,每路存一個。這類做法充足應用了CPU流水線的機能
for(;i < len;++i)
local_result_1 += local_data[i];
*result = local_result_1 + local_result_2;
Tips:
上文中寫到的函數年夜都帶有static inline症結字,這是何意?起首我們要肯定一件工作,關於非工程的單文件而言,static函數並沒有甚麼意義(意義指的是關於可見性而言,並不是說它一無可取),很多人關於static函數覺得茫然的緣由在於:我明明將一個函數聲明界說成static類型了,然則我照樣可以在其余文件中拜訪到啊!
其實這是由於你基本就沒有懂得C說話工程這個意思,年夜部門人是這麼測試的:
起首在一個文件夾裡創立兩個文件 test_static.c和static.h:
/*static.h*/
#ifndef STATIC_H
#define STATIC_H
static void test(void);
static void test(void);
{
printf("Hello World!\n");
}
#endif
...
/*test_static.c*/
#include <stdio.h>
#include "static.h"
void test(void);
int main(void)
{
test(); //編譯經由過程,可以運轉。
return 0;
}
然後編譯運轉,發明可以經由過程啊!!尺度怎樣說在其他文件中弗成見?而把static.h去失落#include以後發明報錯test undefined,剎時初學者就紛亂了。
好吧,現實上是先輩們和教材的錯,由於從始至終,一切外界景象都告知我們C法式是自力的一個一個文件構成的,然則並沒有告知我們要先將他們弄成一個工程!此處假如是應用Visual Studio進修C說話的能夠會對工程這個概念懂得的略微好一些,固然不推舉應用 VS 進修C說話。
你想要完成static函數僅在本文件可見的後果,請你先補習一下工程這個概念,關於任何可見或許弗成見的概念而言都是樹立在一個工程內而言,而不是像上方的代碼,應用#include來表現,你都#include了,那還有甚麼可見弗成見確當然都可見了。所以一個static函數可見於弗成見是基於一個個工程裡的一切C說話源文件而言的。所以你將常看見先輩們這麼答復你的發問:
/*static.h*/
#ifndef STATIC_H
#define STATIC_H
static void test(void);
static void test(void);
{
printf("Hello World!\n");
}
#endif
...
/*test_static.c*/
#include <stdio.h>
void test(void);
int main(void)
{
test(); //報錯,由於test是static函數。
return 0;
}
發明了嗎?在上方代碼中,少了一行#include "static.h"然則這個代碼照舊可行,由於這兩個文件是樹立在統一個工程裡的,而不是在一個文件夾中隨便新建兩個源文件這麼簡略,你可使用各個IDE的工程功效來停止測試。
回到正題,在這裡略微提一下static對函數的某些感化,它可讓函數放在一個靜態的空間中,而不是棧裡,這是的它的挪用加倍疾速,常常與inline症結字一路應用,為的就是讓函數加倍快。然則有益有弊,可以本身衡量一下。
注:存儲器山就是關於分歧步長分歧年夜小文件的讀取速度的三維坐標圖,形似一座山,z軸為速度,x軸為步長,y軸為文件年夜小(字節),某些主流的測評軟件就是這個道理(將存儲器山的圖象停止一下簡略的變換,就可以獲得哪些軟件出現的後果圖象)。
上文提到過,任何一點小修改,都有能夠讓法式的機能產生很年夜的更改,這是為何?
其時我們並未深究,因為我們慣性的以為盤算機的運作方法和人類的運作方法分歧,也在過往的經歷中以為盤算機必定是在任何方面超出人類的存在,然則現實上,盤算機除在反復盤算方面比人類的速度要疾速之外,其他方面遠遠落伍於人類的年夜腦,即使是我們最稀少平凡的視覺辨認(看器械辨認物體),在盤算機看來都是一門極端精深的范疇,所以我們如今的時期的盤算機還處於起步狀況,在這類時期裡,法式員的感化是無可替換的,異樣法式員的一舉一動關乎盤算機的命運。
能夠在許多的方面,都曾經接觸了一台盤算機的重要構成結構,和法式員最互相關注的就是CPU,主存和硬盤了,能夠到如今為止許多法式員依然以為編法式和這些存儲器有甚麼關系?但是一個法式員,特殊是編寫C說話法式的法式員,最年夜的影響身分便來自於此,在盤算機的存儲器構造中,分為四種條理:
CPU存放器、高速緩存器、主存、硬盤。
然則有無想過,為何盤算機存儲器體系要分紅這四層構造呢?我們曉得,上述四種存儲器的讀寫速度順次下降,我們為何不選擇一種速度中庸的,價錢也中庸的資料,制作一切條理的存儲器呢?
有人給出的說明是,一個編寫優越的法式老是偏向於拜訪條理更高的存儲器,而關於如今的技巧,價錢昂揚而沒法年夜量制作的高速存儲器來講,我們可以選擇按條理分派結構,讓我們以最低的本錢的存儲器到達應用最高的速度存儲器的後果。
就像是在本身的盤算機上,當我們翻開一個很粗笨的運用法式後,會發明,下一次再翻開的時刻能夠會更快,就像之前汗青遺留的一個成績 Visual Studio 2008 在 Windows XP 上,第一次翻開老是非常卡頓,然則當封閉法式以後第二次翻開倒是很流利。在參考書中,提到過兩個評價法式速度的症結點:時光部分性和空間部分性 。
時光部分性:在拜訪過某塊存儲器以後的不久的未來,極可能會再次拜訪它
空間部分性:在拜訪過某塊存儲器以後的不就的未來,極可能拜訪其臨近的存儲器地位。
優越的部分性改良普通能很好的晉升法式的機能。
所謂部分性就是當我們應用過某些資本後,這些資本老是以一種情勢存儲在更高等更便利的存儲器傍邊,讓比來一次的存取要求可以或許加倍有用率的停止。
打個不太貼切的比方,假定盤算機是一個家,CPU是一小我,想象一下這個家中的一切物品都是井井有條的,這小我想要任務必定會須要任務物品,所以他須要從某些處所拿來,用完今後再放歸去,這些處所就是存儲器,然則過了一段時光發明這麼做太糟蹋時光,有時刻某些器械太遠了,所以,人想把它把它放在離本身更進的處所,如許本身的效力就高許多,假如這個器械一段時光內不再用,則把它放回原處,留出地位給更須要的任務物品,因而構成了越常應用的物品離人越近的景象。這就是盤算機存儲器的分層構造的意義。
而關於一個有優越部分性的法式而言,我們總能在離本身比來的處所找到我們所須要的數據,回到盤算機:我們曉得盤算機的存儲器是分層構造的,即每層對應著分歧的讀寫速度品級(CPU存放器 > 高速緩存 > 主存 > 硬盤),而我們的法式老是依照從左至右的次序順次查找,每次找到一個所須要數據,不出不測,老是將其挪動到上一條理的存儲器中存儲,以便下次更高速的拜訪,我們稱這類行動叫做 射中 。越好的法式,越能將其時所需的數據放在越接近右邊的處所。這就是部分性的意義地點。
固然,存儲器如斯分層也是出於無法,在處置器的速度和存儲器的速度其實差距的情形下只要如斯做能力讓處置器加倍充足的應用,而不至於期待存儲器讀寫而余暇,或許某一天,當內存的位價和通俗硬盤平起平坐或許差距不多的時刻,或許內存就是硬盤了。而現今也有人應用某些特別的軟件在完成這個功效,憑著本身盤算機上年夜容量的內存,朋分出來看成硬盤應用,存取速度讓硬盤瞠乎其後。
部分性:
後方提到下場部性,部分性表現在了,當步長越年夜,空間部分性越低,年夜多半情形下會形成機能下降,好比最多見的多維數組輪回(我鮮少應用多維數組的緣由之一便在於此),後面說過量維數組現實上只是數個一維數組的包裝罷了,C說話中並沒有真實的多維數組,而是將其解讀成內存中的一維的持續內存,然則當我們遍歷它的時刻,C說話為了不讓我們被底層完成所困擾,所以生成了多維數組遍歷的假象:
讓我們重溫一遍"多維數組":
#include <stdio.h>
int main(void)
{
int dim_1_arr[4] = {1, 2, 3, 4};
int dim_2_arr[2][2] = { {1, 2}, {3, 4} };
int result_1 = 0;
int result_2 = 0;
for(int i = 0;i < 4;++i)
result_1 += dim_1_arr[i];
return 0;
}
此例中,對一維數組停止步長為 1 遍歷乞降,假定內存中數組的肇端地位是 0
0 => 4 => 8 => 12
for(int j = 0;j < 3;++j){
for(int i = 0;i < 3;++i){
result_2 += dim_2_arr[i][j];
}
}
此例中,我們的步長是若干呢?我們來看一下
0 => 8 => 4 => 12
可以很清楚的看出兩段分歧代碼之間的騰躍,為何?不雅察到多維數組的遍歷中我們戰爭時的做法有些分歧,是先對i停止遍歷,再對j停止遍歷,這就招致了法式必需在內存塊中無紀律的跳動,這裡的無紀律是盤算機以為的無紀律,固然在我們看來切實其實是有跡可尋,優良的編譯器可以或許對它停止優化處置。避實就虛,即這段法式的空間部分性比擬差,關於一個在內存中年夜幅度騰躍,無紀律騰躍的法式都將影響法式的機能。這個剖斷關於一個持續的內存塊來講是很主要的,好比C說話中的構造體。
現實上C說話也是可以或許面向對象的,然則非常龐雜,就像拿著棒子織衣服一樣。而C說話的機構體可以或許讓我們在必定水平上初步懂得對象這個概念,由於它是一個完全的個別,固然對外界絕不設防。
關於構造體:
#define VECTOR 4
typedef struct{
double salary;
int index[4];
}test_data;
int main(void)
{
int result_1 = 0;
int result_2 = 0;
test_data dim_1_arr[VECTOR];
/* ...填湊數據 */
for(int i = 0;i < VECTOR;++i)
{
for(int j = 0;j < 4;++j)
result_1 += dim_1_arr[i].index[j];
}/* for loop 1 */
for(int j = 0;j < 4;++j)
{
for(int i = 0;i < VECTOR;++i)
result_2 += dim_1_arr[i].index[j];
}/* for loop 2 */
return 0;
}
照樣和上方一樣,假定 dim_1_arr 肇端地位為 0
for loop 1: 8 => 12 => 16 => 20 ==> 32 => 36 => 40 => 44 ==> ... for loop 2: 8 => 32 => 56 => 80 ==> 12 => 36 => 60 => 84 ==> ...
從上方不完全的比擬來看,loop 1 絕對於 loop 2 來講有更好的空間部分性,很顯著在 loop 2 中,CPU讀取是在無紀律的內存地位騰躍,而 loop 1 則是以單調遞增的趨向向前(這裡的向前指的是直不雅上的向前)讀取內存。
在此處回想一下C說話的構造體性質與常識:
關於隨意率性一個完全界說的構造體,每個對象所占領的內存年夜小都相符內存對齊的規矩。
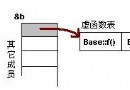
關於構造體內的各個成員而言,其絕對於對象存儲地址肇端的間隔,稱為偏移量。
說明:
內存對齊就是關於一個構造體而言,其所占內存年夜小老是最年夜成員的整數倍,個中最年夜成員指的是最根本成員,即:
typedef struct{
test_data test_1;
int test_2;
}test_data_2;
/*...*/
printf("The size of test_data_2 = %d\n",sizeof(test_data_2));
/*...*/
` 輸入: The size of test_data_2 = 32 `
typedef struct{
int index[4];
int store_1;
int store_2;
}test_data_3;
typedef struct{
test_data_3 test_3;
int test_4;
}test_data_4;
/*...*/
printf("The size of test_data_4 = %d\n",sizeof(test_data_4));
/*...*/
` 輸入:
The size of test_data_2 = 28`
細心比較`test_data_3`與`test_data`的差別,可以發明分歧處,在前者的外部包括了一個`double`類型的成員,在我的機械上它的長度為 `8` ,後者的外部包括了兩個`int`類型的成員,每一個長度為 `4`,然則他們的長度在直不雅上是一樣的!然則真正在應用的時刻我們能力發覺到個中的差別,這就是我所說的**最根本成員**的意義地點。固然我們在應用構造體的時刻,可以或許將其看成一個全體,然則現實上他們與內建(build-in)的類型照樣有一些差別的。
偏移量淺顯地說,就是該成員肇端地址間隔肇端地位的長度,在構造體中,C說話是怎樣為構造體分派設定年夜小的呢?除內存對齊外,還須要斟酌界說構造體時,個中成員的聲明次序,換句話說,誰起首聲明,誰的地位就靠前。而某個成員的偏移量代表著其肇端地位減去其所屬對象的肇端地位,(此處須要留意的是,兩個絕不相關的指針相減所獲得的成果是有意義的,只要當兩個指針同在一個感化域內時,減法才是成心義的,為了不潛伏的毛病,我們要謹嚴應用指針減法操作)。
就此回過火去再看看上方的 loop 說明,應當可以或許懂得到,那些數字是經由過程偏移量來停止盤算獲得的。
之所以沒有具體的引見時光部分性是由於,關於時光部分性而言,其最年夜的影響身分就是操作區域的年夜小,好比我們操作的數組或許文件的年夜小,越小時光部分性越好,試想一下關於一個小的文件和年夜的文件,我們更輕易操作到統一塊處所屢次的,一定是小的文件。而操作文件的年夜小有時刻其實不能很好得成為我們的操作身分,故只能多存眷空間部分性。
高速緩存器:
在後方提到了,普通情形下,部分性好的法式可以或許讓法式比部分性差的法式更有用率,而關於部分變量而言,一個好的編譯器老是盡量的將之優化,使其能充足應用CPU存放器,那末存放器的下方,也就是速度最接近存放器的,就是所謂的高速緩存器了,關於高速緩存器而言,其最年夜的功能就是緩沖,緩沖有兩層意思:
緩存數據,使下一次須要的數據盡量的“接近”CPU,此處的接近其實不是物理意義上的間隔接近。
緩沖一下CPU於存儲器偉大的速度差距,避免CPU余暇糟蹋。
關於如今的盤算機而言,CPU根本都是三層緩存:一級緩存(L1),二級緩存(L2),三級緩存(L3),可以經由過程 CPU-Z(Windows) / Mac OS體系申報 來檢查本身的CPU緩存,在軟件中我們可以或許看到,在一級緩存中會分為兩個部門 :一級數據,一級指令,這代表著只讀寫數據,只讀寫指令,如許離開的意義在於處置器可以或許同時處置一個數據和一個指令,上述所說的都是關於一個CPU核而言的,也就是說當CPU是多核的時刻,那就有多個這類“功效聚集(L1+L2)”。二級緩存則與一級緩存同在一個核中,每一個核都具有本身的二級緩存,最初一切核同享獨一一個(L3)
總的來講,關於高速緩存器來講,普通分為三層,第一層比擬特別由自力的兩個部門構成,第二層第三層則是各自自力一體並未辨別功效(既存數據又存指令),而第一層和第二層則是每一個核零丁享有分歧的緩存器,第三層則是各個核同享一個層,所以我們常常看見在小我盤算機上,L3的年夜小常常是以MB為單元的,而第一層則多以KB乃至是Byte為單元。
在現實中,愛好研討盤算機的人常常會在一些專業軟件中看見本身的CPU設置裝備擺設,在緩存一欄的一級和二級中總能看見2 x 32 KBytes之類的參數,32代表的就是某級的緩存年夜小,而後方的2則是核數,即有幾個核便有乘若干,和之前所說的分歧。
高速緩存器的各個層仍然遵照慢慢降速的紀律,即讀取周期 L1 < L2 < L3,而影響較年夜的就是上文提到的的射中率,我們曉得越下層的高速緩存器老是將基層的存儲器映照在本身的存儲器中,而依照邏輯揣摸,下層的現實空間比基層的要小,由於下層的空間加倍名貴速度更快,這就招致我們沒法將基層的空間逐個對應的映照到下層裡,那末我們就想到一個方法,其實不是將基層存儲器的內容完整映照到下層,而是下層有選擇性的將基層的部門內容抽取到下層,這就是不射中以後的操作。
關於CPU從存儲器中讀取數據這個操作,假如我們應用了高速緩存和內存這兩個概念,那末就會有一個延長概念,射中。而關於這個概念只要兩種情形,射中或許不射中。而關於一個初始化的高速緩存器,它必定是空的,或許在物理意義上它其實不是空,然則現實上在法式看來它切實其實是空的,為了辨別這個,高速緩存器專門應用了一個位(bit)來表現此組能否有用(等於否為空),既然它是空的那末,我們第一次不管若何都沒法射中數據,這時候候該層的高速緩存器就會向下一層,在該層中尋覓所要的數據,每主要向下一層請求尋覓的行動普通稱為處分,而當我們從存儲器中將所需的數據加載到高速緩存器中的時刻,我們便開端了運算,而一切關於高速緩存器效力的改良都集中在射中率的晉升。
假定有一個數組須要操作,因為數組是一個持續的內存空間,對其停止步長為1的操作具有很好的空間部分性,那末可以當做一個很好的例子,在高速緩存器看來讀取一個有n(n>N)個元素的數組vector其實不是一次性讀完,而是分次讀取,假如讀取了k次那末至多有k次不射中,這是弗成防止的,而關於讀取的數據也紛歧定是我們須要的,用書上的例子來講:
vector:|[0]|[1]|[2]|[3]|[]|[]|[]|[]|[]|[]|[]|
假定操作數組的每個元素,我們一次讀取三個內存的值,類型為int,由於道理都一樣。那末在初始化時刻,高速緩存器為空,在第一次操作的時刻,讀取了四個(如上所示),此時必定經由了一次 不射中 。
很好懂得,由於緩存器空,所以第一次操作必定不射中,所以我們須要向上級存儲器讀取我們須要的數據,那末第二拜訪高速緩存的時刻,可以射中`vector[0]`,順次射中後續兩個,直到須要`vector[4]`,湧現了不射中,那末我們就須要反復上一步,再次讀取三個數據,順次類推直到停止。`vector:|[0]|[1]|[2]|[3]|[4]|[5]|[6]|[7]|[]|[]|[]|`
如今我們可以或許從必定層面上說明為何部分性好的法式比部分性差的法式要有更好的效力了,緣由就在關於高速緩存器的應用,**起首重復應用當地暫時變量可以或許充足的挪用高速緩存器的功效做到讀寫的最優化,其次步長為越小也越能盡最年夜的才能施展高速緩存器讀取的數據**,在這點上再回過火思慮多維數組的遍歷並停止操作,假如沒有斟酌空間部分性(即先操作年夜塊,再操作小塊),那末在高速緩存器中,它的不射中率使人發指,這也是操作欠妥效力低的緣由。
另外一方面,關於分歧步長而言,其影響的也是高速緩存器的射中率,照樣上方的vector
步長 | 1 | 2 | 3 | 4 | 5 |
不射中/射中 |1/4|1/2|2/3|1/1|1/1|
可以看出來,關於步長而言,當到了必定的下限今後,每次的要求都邑不射中,那末這時候候本層的高速緩存器相當於作廢,時光全都消耗鄙人層數據傳送到下層的時光,由於每次讀取都是不射中,可以應用上方的例子本身試著推理一下。
以上所說的每次讀取下一級別存儲器數據的時刻,都是依照內存對齊,來讀取的,假如你的內存數據,例如讀取構造體時,沒有放在內存對齊的地位(此地方說的內存對齊地位是以每次該級別存儲器讀取的年夜小為對齊倍數,而不是構造體在內存中存儲時的內存對齊地位),那末會將該地位的前後補齊倍數的肇端地位來讀取
也就意味著,其實不是每次緩存讀取都是如斯的完善,正好都從內存中數據的首部開端讀取,而是整片依據內存倍數停止讀取。