作者:July、狂想曲創作組。
前奏
有這樣一個問題:在一條左右水平放置的直線軌道上任選兩個點,放置兩個機器人,請用如下指令系統為機器人設計控制程序,使這兩個機器人能夠在直線軌道上相遇。(注意兩個機器人用你寫的同一個程序來控制)。
指令系統:只包含4條指令,向左、向右、條件判定、無條件跳轉。其中向左(右)指令每次能控制機器人向左(右)移動一步;條件判定指令能對機器人所在的位置進行條件測試,測試結果是如果對方機器人曾經到過這裡就返回true,否則返回false;無條件跳轉,類似匯編裡面的跳轉,可以跳轉到任何地方。
ok,這道很有意思的趣味題是去年微軟工程院的題,文末將給出解答(如果急切想知道此問題的答案,可以直接跳到本文第三節)。同時,我們看到其實這個題是一個典型的追趕問題,那麼追趕問題在哪種面試題中比較常見?對了,鏈表追趕。本章就來闡述這個問題。有不正之處,望不吝指正。
第一節、求鏈表倒數第k個結點
第13題、題目描述:
輸入一個單向鏈表,輸出該鏈表中倒數第k個結點,
鏈表的倒數第0個結點為鏈表的尾指針。
分析:此題一出,相信,稍微有點 經驗的同志,都會說到:設置兩個指針p1,p2,首先p1和p2都指向head,然後p2向前走k步,這樣p1和p2之間就間隔k個節點,最後p1和p2同時向前移動,直至p2走到鏈表末尾。
前幾日有朋友提醒我說,讓我講一下此種求鏈表倒數第k個結點的問題。我想,這種問題,有點經驗的人恐怕都已了解過,無非是利用兩個指針一前一後逐步前移。但他提醒我說,如果參加面試的人沒有這個意識,它怎麼也想不到那裡去。
那在平時准備面試的過程中如何加強這一方面的意識呢?我想,除了平時遇到一道面試題,盡可能用多種思路解決,以延伸自己的視野之外,便是平時有意注意觀察生活。因為,相信,你很容易了解到,其實這種鏈表追趕的問題來源於生活中長跑比賽,如果平時注意多多思考,多多積累,多多發現並體味生活,相信也會對面試有所幫助。
ok,扯多了,下面給出這個題目的主體代碼,如下:
struct ListNode
{
char data;
ListNode* next;
};
ListNode* head,*p,*q;
ListNode *pone,*ptwo;
ListNode* fun(ListNode *head,int k)
{
pone = ptwo = head;
for(int i=0;i<=k-1;i++)
ptwo=ptwo->next;
while(ptwo!=NULL)
{
pone=pone->next;
ptwo=ptwo->next;
}
return pone;
}
擴展:
這是針對鏈表單項鏈表查找其中倒數第k個結點。試問,如果鏈表是雙向的,且可能存在環呢?請看第二節、編程判斷兩個鏈表是否相交。
第二節、編程判斷兩個鏈表是否相交
題目描述:給出兩個單向鏈表的頭指針(如下圖所示),
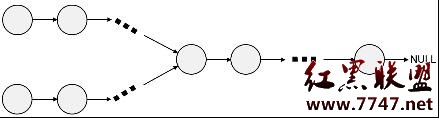
比如h1、h2,判斷這兩個鏈表是否相交。這裡為了簡化問題,我們假設兩個鏈表均不帶環。
分析:這是來自編程之美上的微軟亞院的一道面試題目。請跟著我的思路步步深入(部分文字引自編程之美):
直接循環判斷第一個鏈表的每個節點是否在第二個鏈表中。但,這種方法的時間復雜度為O(Length(h1) * Length(h2))。顯然,我們得找到一種更為有效的方法,至少不能是O(N^2)的復雜度。
針對第一個鏈表直接構造hash表,然後查詢hash表,判斷第二個鏈表的每個結點是否在hash表出現,如果所有的第二個鏈表的結點都能在hash表中找到,即說明第二個鏈表與第一個鏈表有相同的結點。時間復雜度為為線性:O(Length(h1) + Length(h2)),同時為了存儲第一個鏈表的所有節點,空間復雜度為O(Length(h1))。是否還有更好的方法呢,既能夠以線性時間復雜度解決問題,又能減少存儲空間?
進一步考慮“如果兩個沒有環的鏈表相交於某一節點,那麼在這個節點之後的所有節點都是兩個鏈表共有的”這個特點,我們可以知道,如果它們相交,則最後一個節點一定是共有的。而我們很容易能得到鏈表的最後一個節點,所以這成了我們簡化解法的一個主要突破口。那麼,我們只要判斷倆個鏈表的尾指針是否相等。相等,則鏈表相交;否則,鏈表不相交。
所以,先遍歷第一個鏈表,記住最後一個節點。然後遍歷第二個鏈表,到最後一個節點時和第一個鏈表的最後一個節點做比較,如果相同,則相交,否則,不相交。這樣我們就得到了一個時間復雜度,它為O((Length(h1) + Length(h2)),而且只用了一個額外的指針來存儲最後一個節點。這個方法時間復雜度為線性O(N),空間復雜度為O(1),顯然比解法三更勝一籌。
上面的問題都是針對鏈表無環的,那麼如果現在,鏈表是有環的呢?還能找到最後一個結點進行判斷麼?上面的方法還同樣有效麼?顯然,這個問題的本質已經轉化為判斷鏈表是否有環。那麼,如何來判斷鏈表是否有環呢?
總結:
所以,事實上,這個判斷兩個鏈表是否相交的問題就轉化成了:
1.先判斷帶不帶環
2.如果都不帶環,就判斷尾節點是否相等
3.如果都帶環,判斷一鏈表上倆指針相遇的那個節點,在不在另一條鏈表上。
如果在,則相交,如果不在,則不相交。
那麼,如何編寫代碼來判斷鏈表是否有環呢?因為很多的時候,你給出了問題的思路後,面試官可能還要追加你的代碼,ok,如下:
//用兩個指針,一個指針步長為1,一個指針步長為2,判斷鏈表是否有環
bool check(const node* head)
{
if(head==NULL)
return false;
node *low=head, *fast=head->next;
while(fast!=NULL && fast->next!=NULL)
{
low=low->next;
fast=fast->next->next;
if(low==fast) return true;
}
return false;
}
問題又來了,如果鏈表可能有環,則如何判斷兩個鏈表是否相交,解決方案如下:
//思路:鏈表1 步長為1,鏈表2步長為2 ,如果有環且相交則肯定相遇,否則不相交
list1 head: p1
list2 head: p2
while( p1 != p2 && p1 != NULL && p2 != NULL )
//但當鏈表有環但不相交時,此處是死循環。!
{
p1 = p1->next;
if ( p2->next )
p2 = p2->next->next;
else
p2 = p2->next;
}
if ( p1 == p2 && p1 && p2)
//相交
else
//不相交
所以,判斷帶環的鏈表,相不相交,只能這樣:
如果都帶環,判斷一鏈表上倆指針相遇的那個節點,在不在另一條鏈表上。如果在,則相交,如果不在,則不相交。
ok,下面,回到本章前奏部分的那道非常有趣味的智力題。
第三節、微軟工程院面試智力題
題目描述:
在一條左右水平放置的直線軌道上任選兩個點,放置兩個機器人,請用如下指令系統為機器人設計控制程序,使這兩個機器人能夠在直線軌道上相遇。(注意兩個機器人用你寫的同一個程序來控制)
指令系統:只包含4條指令,向左、向右、條件判定、無條件跳轉。其中向左(右)指令每次能控制機器人向左(右)移動一步;條件判定指令能對機器人所在的位置進行條件測試,測試結果是如果對方機器人曾經到過這裡就返回true,否則返回false;無條件跳轉,類似匯編裡面的跳轉,可以跳轉到任何地方。
分析:我盡量以最清晰的方式來說明這個問題(大部分內容來自ivan,big等人的討論):
1、首先題目要求很簡單,就是要你想辦法讓A最終能趕上B,A在後,B在前,都向右移動,如果它們的速度永遠一致,那A是永遠無法追趕上B的。但題目給出了一個條件判斷指令,即如果A或B某個機器人向前移動時,若是某個機器人經過的點是第二個機器人曾經經過的點,那麼程序返回true。對的,就是抓住這一點,A到達曾經B經過的點後,發現此後的路是B此前經過的,那麼A開始提速兩倍,B一直保持原來的一倍速度不變,那樣的話,A勢必會在|AB|/move_right個單位時間內,追上B。ok,簡單偽代碼如下:
start:
if(at the position other robots have not reached)
move_right
if(at the position other robots have reached)
move_right
move_right
goto start
再簡單解釋下上面的偽代碼(@big):
A------------B
| |
在A到達B點前,兩者都只有第一條if為真,即以相同的速度向右移動,在A到達B後,A只滿足第二個if,即以兩倍的速度向右移動,B依然只滿足第一個if,則速度保持不變,經過|AB|/move_right個單位時間,A就可以追上B。
2、有個細節又出現了,正如ivan所說,
if(at the position other robots have reached)
move_right
move_right
上面這個分支不一定能提