以編程方式添加新實體
MSRS 提供了多種創建和使用模擬的方法。除 VSE 之外,您還可以通過創建 DSS 服務項目以編程方式向模擬中添加實體。MSRS 提供了一個 Visual Studio 模板,可用於新建 DSS 服務。安裝 MSRS 後,在創建新的 Visual Studio 項目 時,只選擇 Simple Dss Service (1.5) 作為模板(請參見圖 4)。
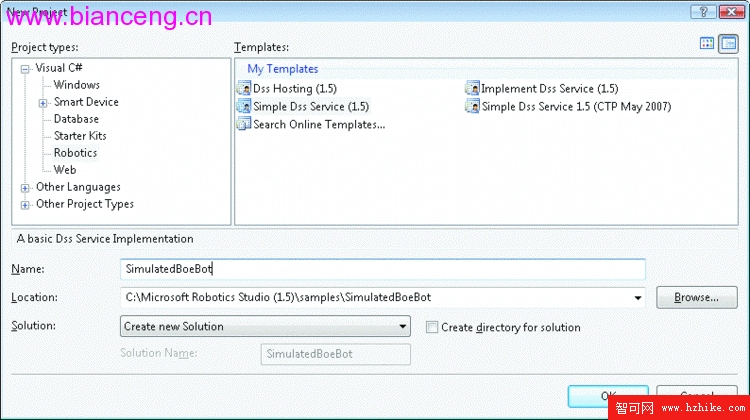
圖 4 在 Visual Studio 2005 模板中新建 DSS 服務
使用模板新建 DSS 服務會隨之創建兩個類文件。實現類默認與項目同名,您 可以在其中添加代碼來創建新實體。以編程方式創建的模擬要求能夠訪問 Simple DSS Service 模板外部的程序集。因此,您將需要添加對圖 5 中所列程序集的引 用。

圖 5 模擬項目附帶的程序集
程序集名稱 說明 PhysicsEngine 提供對基本 AGEIA 軟件物理引擎的訪問。 RoboticsCommon 提供對 PhysicalModel 命名空間的訪問,此空間用於定義機器 人的物理特征。 SimulationCommon 提供對使用模擬和物理引擎時要用到的類型定義的訪問。 SimulationEngine 提供對模擬引擎的訪問。 SimulationEngine.proxy 代表模擬引擎的代理,當加載模擬引擎作為合作伙伴時會用到 此代理。添加引用後,您還需要在實現類文件中添加下列命名空間聲明:
using Microsoft.Robotics.Simulation;
using Microsoft.Robotics.Simulation.Engine;
using engineproxy = Microsoft.Robotics.Simulation.Engine.Proxy;
using Microsoft.Robotics.Simulation.Physics;
using Microsoft.Robotics.PhysicalModel;