在游戲開發中,AI的最基本問題之一就是尋路算法或稱路徑規劃算法,在三 年前,我曾實現過 基於“圖算法”的最短路徑規劃算法,然而在游 戲中,我們通常將地圖抽象為有單元格構成的矩形,如:
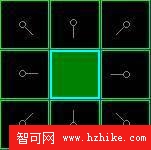
這個微型地圖 由3*3的單元格構成,當然,實際游戲中的地圖通常比它大很多,這裡只是給出 一個示例。
由於游戲地圖通常由單元格構成,所以,基於“圖算法 ”的路徑規劃便不再那麼適用,我們需要采用基於單元格的路徑規劃算法 。A*算法是如今游戲所采用的尋路算法中相當常用的一種算法,它可以保證在任 何起點和任何終點之間找到最佳的路徑(如果存在的話),而且,A*算法相當有 效。
關於A*算法的原理的詳細介紹,可以參考 這篇文章。當你明白A*算 法的原理之後,在來看接下來的A*算法的實現就會比較容易了。
現在, 讓我們轉入正題,看看如何在C#中實現A*算法。
首先,我們把地圖劃分 為單元格,如此,一個地圖就可以由(M行*N列)個單元格構成。我們使用 AStarNode類來抽象單元格,表示一個節點,而節點的位置用Point表示,其X坐 標表示Column Index,Y坐標表示Line Index。AStarNode的定義如下:
Code
[copy to clipboard]CODE:
/// <summary>
/// AStarNode 用於保存規劃到當前節點時的各個 Cost值以及父節點。
/// zhuweisky 2008.10.18
/// </summary>
public class AStarNode
{
#region Ctor
public AStarNode(Point loc, AStarNode previous, int _costG, int _costH)
{
this.location = loc;
this.previousNode = previous;
this.costG = _costG;
this.costH = _costH;
}
#endregion
#region Location
private Point location = new Point(0, 0);
/// <summary>
/// Location 節點所在的位置, 其X值代表ColumnIndex,Y值代表LineIndex
/// </summary>
public Point Location
{
get { return location; }
}
#endregion
#region PreviousNode
private AStarNode previousNode = null;
/// <summary>
/// PreviousNode 父節點,即是由哪個節點導航到當前節點的。
/// </summary>
public AStarNode PreviousNode
{
get { return previousNode; }
}
#endregion
#region CostF
/// <summary>
/// CostF 從起點導航經過本節點然後再到目的節點的估算總代價。
/// </summary>
public int CostF
{
get
{
return this.costG + this.costH;
}
}
#endregion
#region CostG
private int costG = 0;
/// <summary>
/// CostG 從起點導 航到本節點的代價。
/// </summary>
public int CostG
{
get { return costG; }
}
#endregion
#region CostH
private int costH = 0;
/// <summary>
/// CostH 使用啟發式方法估算的從本節點到目的節點的代價。
/// </summary>
public int CostH
{
get { return costH; }
}
#endregion
#region ResetPreviousNode
/// <summary>
/// ResetPreviousNode 當從起點到達本節點 有更優的路徑時,調用該方法采用更優的路徑。
/// </summary>
public void ResetPreviousNode(AStarNode previous, int _costG)
{
this.previousNode = previous;
this.costG = _costG;
}
#endregion
public override string ToString()
{
return this.location.ToString();
}
}