1、API描述
在WIN32 API中,串口使用文件方式進行訪問,其操作的API基本上與 文件操作的API一致。
打開串口
Win32 中用於打開串口的API 函數為 CreateFile,其原型為:
HANDLE CreateFile (
LPCTSTR lpFileName, //將要打開的串口邏輯名,如COM1 或COM2
DWORD dwAccess, //指定串口訪問的類型 ,可以是讀取、寫入或兩者並列
DWORD dwShareMode, //指定共享屬性,由於串口不 能共享,該參數必須置為0
LPSECURITY_ATTRIBUTES lpsa, //引用安全性屬性結構, 缺省值為NULL
DWORD dwCreate, //創建標志,對串口操作該參數必須置為OPEN EXISTING
DWORD dwAttrsAndFlags, //屬性描述,用於指定該串口是否可進行異步操 作,
//FILE_FLAG_OVERLAPPED:可使用異步的I/O
HANDLE hTemplateFile //指向模板文件的句柄,對串口而言該參數必須置為NULL
);
例如,以 下程序用於以同步讀寫方式打開串口COM1:
HANDLE hCom;
DWORD dwError;
hCon = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL);
if (hCom == (HANDLE)0xFFFFFFFF)
{
dwError = GetLastError();
MessageBox(dwError);
}
對 於dwAttrsAndFlags參數及FILE_FLAG_OVERLAPPED標志的由來,可解釋如下:Windows文件操 作分為同步I/O和重疊I/O(Overlapped I/ O)兩種方式,在同步I/O方式中,API會阻塞直到操 作完成以後才能返回(在多線程方式中,雖然不會阻塞主線程,但是仍然會阻塞監聽線程) ;而在重疊I/O方式中,API會立即返回,操作在後台進行,避免線程的阻塞。重疊I/O非常靈 活,它也可以實現阻塞(例如我們可以設置一定要讀取到一個數據才能進行到下一步操作)。 如果進行I/O操作的API 在沒有完成操作的情況下返回,我們可以通過調用 GetOverLappedResult()函數阻塞到I/O操作完成後返回。
配置串口
配置串口 是通過改變設備控制塊DCB(Device Control Block) 的成員變量值來實現的,接收緩沖區和 發送緩沖區的大小可通過SetupComm函數來設置。
DCB結構體定義為:
typedef struct _DCB { // dcb
DWORD DCBlength; // sizeof(DCB)
DWORD BaudRate; // current baud rate
DWORD fBinary: 1; // binary mode, no EOF check
DWORD fParity: 1; // enable parity checking
DWORD fOutxCtsFlow:1; // CTS output flow control
DWORD fOutxDsrFlow:1; // DSR output flow control
DWORD fDtrControl:2; // DTR flow control type
DWORD fDsrSensitivity:1; // DSR sensitivity
DWORD fTXContinueOnXoff:1; // XOFF continues Tx
DWORD fOutX: 1; // XON/XOFF out flow control
DWORD fInX: 1; // XON/XOFF in flow control
DWORD fErrorChar: 1; // enable error replacement
DWORD fNull: 1; // enable null stripping
DWORD fRtsControl:2; // RTS flow control
DWORD fAbortOnError:1; // abort reads/writes on error
DWORD fDummy2:17; // reserved
WORD wReserved; // not currently used
WORD XonLim; // transmit XON threshold
WORD XoffLim; // transmit XOFF threshold
BYTE ByteSize; // number of bits/byte, 4-8
BYTE Parity; // 0-4=no,odd,even,mark,space
BYTE StopBits; // 0,1,2 = 1, 1.5, 2
char XonChar; // Tx and Rx XON character
char XoffChar; // Tx and Rx XOFF character
char ErrorChar; // error replacement character
char EofChar; // end of input character
char EvtChar; // received event character
WORD wReserved1; // reserved; do not use
} DCB;
而SetupComm函數的原型則為:
BOOL SetupComm(
HANDLE hFile, // handle to communications device
DWORD dwInQueue, // size of input buffer
DWORD dwOutQueue // size of output buffer
);
以下 程序將串口設置為:波特率為9600,數據位數為7位,停止位為2 位,偶校驗,接收緩沖區和 發送緩沖區大小均為1024個字節,最後用PurgeComm函數終止所有的後台讀寫操作並清空接收 緩沖區和發送緩沖區:
DCB dcb;
dcb.BaudRate = 9600; //波特率為 9600
dcb.ByteSize = 7; //數據位數為7位
dcb.Parity = EVENPARITY; //偶校 驗
dcb.StopBits = 2; //兩個停止位
dcb.fBinary = TRUE;
dcb.fParity = TRUE;
if (!SetCommState(hCom, &dcb))
{
MessageBox("串 口設置出錯!");
}
SetupComm(hCom, 1024, 1024);
PurgeComm(hCom, PURCE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR);
超時設置
超時設置是通過改變COMMTIMEOUTS結構體的成員變量值來實現的,COMMTIMEOUTS 的原型為:
typedef struct _COMMTIMEOUTS
{
DWORD ReadIntervalTimeout; //定義兩個字符到達的最大時間間隔,單位:毫秒
//當讀取 完一個字符後,超過了ReadIntervalTimeout,仍未讀取到下一個字符,就會
//發生 超時
DWORD ReadTotalTimeoutMultiplier;
DWORD ReadTotalTimeoutConstant;
//其中各時間所滿足的關系如下:
//ReadTotalTimeout = ReadTotalTimeOutMultiplier* BytesToRead + ReadTotalTimeoutConstant
DWORD WriteTotalTimeoutMultiplier;
DWORD WriteTotalTimeoutConstant;
} COMMTIMEOUTS, *LPCOMMTIMEOUTS;
設 置超時的函數為SetCommTimeouts,其原型中接收COMMTIMEOUTS的指針為參數:
BOOL SetCommTimeouts(
HANDLE hFile, // handle to communications device
LPCOMMTIMEOUTS lpCommTimeouts // pointer to comm time-out structure
);
以下程序將串口讀操作的超時設定為10 毫秒:
COMMTIMEOUTS to;與 SetCommTimeouts對應的GetCommTimeouts()函數的原型為:
memset(&to, 0, sizeof(to));
to.ReadIntervalTimeout = 10;
SetCommTimeouts(hCom, &to);
BOOL GetCommTimeouts(
HANDLE hFile, // handle of communications device
LPCOMMTIMEOUTS lpCommTimeouts // pointer to comm time-out structure
);
事件設置
在讀寫串口之前,需要用SetCommMask ()函數設置事件 掩模來監視指定通信端口上的事件,其原型為:
BOOL SetCommMask(
HANDLE hFile, //標識通信端口的句柄
DWORD dwEvtMask //能夠使能的通信事件
);
有了Set當然還會有Get,與SetCommMask對應的GetCommMask()函數的原型為 :
BOOL GetCommMask(
HANDLE hFile, //標識通信端口的句柄
LPDWORD lpEvtMask // address of variable to get event mask
);
串口上可以發生的事件可以是如下事件列表中的一個或任意組合: EV_BREAK、EV_CTS、EV_DSR、EV_ERR、EV_RING、EV_RLSD、EV_RXCHAR、EV_RXFLAG、 EV_TXEMPTY。 我們可以用WaitCommEvent()函數來等待串口上我們利用SetCommMask ()函 數設置的事件:
BOOL WaitCommEvent(
HANDLE hFile, //標識通信端 口的句柄
LPDWORD lpEvtMask, // address of variable for event that occurred
LPOVERLAPPED lpOverlapped, // address of overlapped structure
);
WaitCommEvent()函數一直阻塞,直到串口上發生我們用所SetCommMask ()函數設置的通信事件為止。一般而言,當WaitCommEvent()返回時,程序員可以由分析 *lpEvtMask而獲得發生事件的類別,再進行相應的處理。
讀串口
對串口進行 讀取所用的函數和對文件進行讀取所用的函數相同,讀函數原型如下:
BOOL ReadFile(
HANDLE hFile, // handle of file to read
LPVOID lpBuffer, // pointer to buffer that receives data
DWORD nNumberOfBytesToRead, // number of bytes to read
LPDWORD lpNumberOfBytesRead, // pointer to number of bytes read
LPOVERLAPPED lpOverlapped // pointer to structure for overlapped I/O
);
寫串口
對串口進行寫入所用的函數和對文件 進行寫入所用的函數相同,寫函數原型如下:
BOOL WriteFile(
HANDLE hFile, // handle to file to write to
LPCVOID lpBuffer, // pointer to data to write to file
DWORD nNumberOfBytesToWrite, // number of bytes to write
LPDWORD lpNumberOfBytesWritten, // pointer to number of bytes written
LPOVERLAPPED lpOverlapped // pointer to structure for overlapped I/O
);
關閉串口
利用API 函數實現串口通信時關閉串口非常簡 單,只需使用CreateFile 函數返回的句柄作為參數調用CloseHandle 即可:
BOOL CloseHandle(
HANDLE hObject // handle to object to close
);
2.例程
在筆者的《深入淺出Win32多線程程序設計之綜合實例》中我們已經給出一個利用WIN API進行串口通信的例子,這裡再給出一個類似的例子,以進一步加深理解。
對話框上控件對應的資源文件(.RC)中的內容如下:
BEGIN
EDITTEXT IDC_RECV_EDIT,28,119,256,46,ES_AUTOHSCROLL
GROUPBOX "發送數據",IDC_STATIC,19,15,282,70
GROUPBOX "接收數據",IDC_STATIC,19,100,282,80
EDITTEXT IDC_SEND_EDIT,29,33,214,39,ES_AUTOHSCROLL
PUSHBUTTON "清除",IDC_CLEAR_BUTTON,248,33,50,14
PUSHBUTTON "發送",IDC_SEND_BUTTON,248,55,50,14
END
而整個對話框的消息映射(描述了消息及其對應的行為)如下:
BEGIN_MESSAGE_MAP(CSerialPortAPIDlg, CDialog)
//{{AFX_MSG_MAP(CSerialPortAPIDlg)
ON_WM_SYSCOMMAND()
ON_WM_PAINT()
ON_WM_QUERYDRAGICON()
ON_BN_CLICKED(IDC_CLEAR_BUTTON, OnClearButton)
ON_BN_CLICKED(IDC_SEND_BUTTON, OnSendButton)
ON_MESSAGE(COM_RECVDATA, OnRecvData)
//}}AFX_MSG_MAP
END_MESSAGE_MAP()
我們為IDC_SEND_EDIT和IDC_RECV_EDIT編輯框控件分別添加了一個CString變量m_recv和m_send,下面的代碼描述了這一行為:
class CSerialPortAPIDlg : public CDialog
{
// Construction
public:
CSerialPortAPIDlg(CWnd* pParent = NULL); // standard constructor
// Dialog Data
//{{AFX_DATA(CSerialPortAPIDlg)
enum { IDD = IDD_SERIALPORTAPI_DIALOG };
CString m_recv; //IDC_RECV_EDIT控件對應的變量
CString m_send; //IDC_SEND_EDIT控件對應的變量
//}}AFX_DATA
// ClassWizard generated virtual function overrides
//{{AFX_VIRTUAL(CSerialPortAPIDlg)
protected:
virtual void DoDataExchange(CDataExchange* pDX); // DDX/DDV support
//}}AFX_VIRTUAL
// Implementation
protected:
BOOL OpenSerialPort1();
HICON m_hIcon;
// Generated message map functions
//{{AFX_MSG(CSerialPortAPIDlg)
virtual BOOL OnInitDialog();
afx_msg void OnSysCommand(UINT nID, LPARAM lParam);
afx_msg void OnPaint();
afx_msg HCURSOR OnQueryDragIcon();
afx_msg void OnClearButton();
afx_msg void OnSendButton();
afx_msg void OnRecvData(WPARAM wParam, LPARAM lParam);
//}}AFX_MSG
DECLARE_MESSAGE_MAP()
};
CSerialPortAPIDlg::CSerialPortAPIDlg(CWnd* pParent /*=NULL*/)
: CDialog(CSerialPortAPIDlg::IDD, pParent)
{
//{{AFX_DATA_INIT(CSerialPortAPIDlg)
//在構造函數中初始化變量
m_recv = _T(""); //在構造函數中初始化變量
m_send = _T("");
//}}AFX_DATA_INIT
// Note that LoadIcon does not require a subsequent DestroyIcon in Win32
m_hIcon = AfxGetApp()->LoadIcon(IDR_MAINFRAME);
}
//建立編輯框控件和變量之間的映射
void CSerialPortAPIDlg::DoDataExchange(CDataExchange* pDX)
{
CDialog::DoDataExchange(pDX);
//{{AFX_DATA_MAP(CSerialPortAPIDlg)
DDX_Text(pDX, IDC_RECV_EDIT, m_recv);
DDX_Text(pDX, IDC_SEND_EDIT, m_send);
//}}AFX_DATA_MAP
}
在對話框的OnInitDialog()函數中,我們啟動窗口監聽線程並將主窗口句柄傳遞給線程控制函數:
BOOL CSerialPortAPIDlg::OnInitDialog()
{
CDialog::OnInitDialog();
// Add "About..." menu item to system menu.
// IDM_ABOUTBOX must be in the system command range.
ASSERT((IDM_ABOUTBOX & 0xFFF0) == IDM_ABOUTBOX);
ASSERT(IDM_ABOUTBOX < 0xF000);
CMenu* pSysMenu = GetSystemMenu(FALSE);
if (pSysMenu != NULL)
{
CString strAboutMenu;
strAboutMenu.LoadString(IDS_ABOUTBOX);
if (!strAboutMenu.IsEmpty())
{
pSysMenu->AppendMenu(MF_SEPARATOR);
pSysMenu->AppendMenu(MF_STRING, IDM_ABOUTBOX, strAboutMenu);
}
}
// Set the icon for this dialog. The framework does this automatically
// when the application's main window is not a dialog
SetIcon(m_hIcon, TRUE); // Set big icon
SetIcon(m_hIcon, FALSE); // Set small icon
// TODO: Add extra initialization here
//啟動串口監視線程
DWORD threadID;
hCommThread = ::CreateThread((LPSECURITY_ATTRIBUTES)NULL, 0,
(LPTHREAD_START_ROUTINE)SerialPort1ThreadProcess,
AfxGetMainWnd()->m_hWnd, 0, &threadID);
if (hCommThread == NULL)
{
::AfxMessageBox("創建串口1處理線程失敗");
::PostQuitMessage(0);
}
return TRUE; // return TRUE unless you set the focus to a control
}
//"清除"按鈕函數
void CSerialPortAPIDlg::OnClearButton()
{
// TODO: Add your control notification handler code here
m_send = "";
UpdateData(false);
}
//發送數據函數("發送"按鈕函數)
void CSerialPortAPIDlg::OnSendButton()
{
// TODO: Add your control notification handler code here
UpdateData(true);
DWORD wCount = 0;
WriteFile(hCom, m_send, m_send.GetLength(), &wCount, NULL);//發送數據
}
//接收數據後(通過監聽線程發來的用戶自定義消息)顯示
void CSerialPortAPIDlg::OnRecvData(WPARAM wParam, LPARAM lParam)
{
CString recvStr((char *)wParam);
m_recv += recvStr;
UpdateData(false);
}
在工程中添加SerialPortControl.h和SerialPortControl.cpp兩個文件,前者聲明串口控制的接口函數及外部全局變量,後者實現串口接口函數及串口監聽線程控制函數。
SerialPortControl.h文件
#ifndef _SERIAL_PORT_CONTROL_H
#define _SERIAL_PORT_CONTROL_H
#define COM_RECVDATA WM_USER+1000//自定義消息
extern HANDLE hCom; //全局變量,串口句柄
extern HANDLE hCommThread; //全局變量,串口線程
//串口監視線程控制函數
extern DWORD WINAPI SerialPort1ThreadProcess(HWND hWnd);
//打開並設置PC串口1(COM1)
extern BOOL OpenSerialPort1();
#endif
SerialPortControl.cpp文件
#include "StdAfx.h"
#include "SerialPortControl.h"
HANDLE hCom; //全局變量,串口句柄
HANDLE hCommThread; //全局變量,串口線程
BOOL OpenSerialPort1()
{
//打開並設置COM1
hCom=CreateFile("COM1", GENERIC_READ|GENERIC_WRITE, 0,NULL , OPEN_EXISTING, 0, NULL);
if (hCom==(HANDLE)-1)
{
AfxMessageBox("打開COM1失敗");
return false;
}
else
{
DCB wdcb;
GetCommState (hCom, &wdcb);
wdcb.BaudRate=9600;//波特率:9600,其他:不變
SetCommState (hCom, &wdcb);
PurgeComm(hCom, PURGE_TXCLEAR);
}
return true;
}
//以一個線程不同監控串口行接收的數據
DWORD WINAPI SerialPort1ThreadProcess( HWND hWnd//主窗口句柄)
{
char str[101];
DWORD wCount; //讀取的字節數
while(1)
{
ReadFile(hCom,str, 100, &wCount, NULL);
if(wCount > 0) //收到數據
{
str[wCount] = '\0';
::PostMessage(hWnd, COM_RECVDATA, (unsigned int) str, wCount);
//發送消息給對話框主窗口,以進行接收內容的顯示
}
}
return TRUE;
}
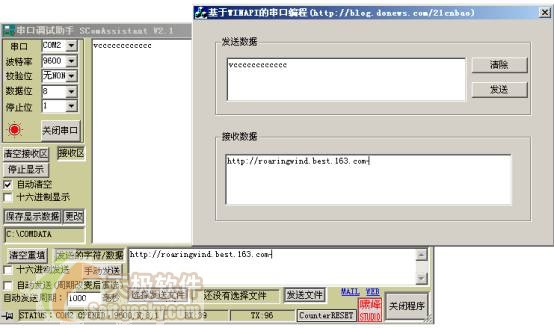
為了驗證程序的正確性,我們使用串口調試助手與本程序協同工作,互相進行收發。下面的抓圖顯示本程序工作正確,發送和接收字符准確無誤。