SiftDetector類的實現代碼如下所示:
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Drawing;
using System.Runtime.InteropServices;
using Emgu.CV;
using Emgu.CV.Structure;
namespace ImageProcessLearn
{
/// <summary>
/// SIFT檢測器
/// </summary>
public class SiftDetector : IDisposable
{
//成員變量
private IntPtr ptrSiftFilt;
//屬性
/// <summary>
/// SiftFilt指針
/// </summary>
public IntPtr PtrSiftFilt
{
get
{
return ptrSiftFilt;
}
}
/// <summary>
/// 獲取SIFT檢測器中的SiftFilt
/// </summary>
public VlSiftFilt SiftFilt
{
get
{
return (VlSiftFilt)Marshal.PtrToStructure (ptrSiftFilt, typeof(VlSiftFilt));
}
}
/// <summary>
/// 構造函數
/// </summary>
/// <param name="width">圖像的寬度</param>
/// <param name="height">圖像的高度</param>
/// <param name="noctaves">階數</param>
/// <param name="nlevels">每一階的層數 </param>
/// <param name="o_min">最小階的索引 </param>
public SiftDetector(int width, int height, int noctaves, int nlevels, int o_min)
{
ptrSiftFilt = VlFeatInvoke.vl_sift_new(width, height, noctaves, nlevels, o_min);
}
public SiftDetector(int width, int height)
: this(width, height, 4, 2, 0)
{ }
public SiftDetector(Size size, int noctaves, int nlevels, int o_min)
: this(size.Width, size.Height, noctaves, nlevels, o_min)
{ }
public SiftDetector(Size size)
: this(size.Width, size.Height, 4, 2, 0)
{ }
/// <summary>
/// 進行SIFT檢測,並返回檢測的結果
/// </summary>
/// <param name="im">單通道浮點型圖像數據,圖像數據不 必歸一化到區間[0,1]</param>
/// <param name="resultType">SIFT檢測的結果類型 </param>
/// <returns>返回SIFT檢測結果——SIFT特征列表;如果檢 測失敗,返回null。</returns>
unsafe public List<SiftFeature> Process(IntPtr im, SiftDetectorResultType resultType)
{
//定義變量
List<SiftFeature> features = null; //檢測結果:SIFT特征列表
VlSiftFilt siftFilt; //
VlSiftKeypoint* pKeyPoints; //指向關鍵點的指針
VlSiftKeypoint keyPoint; //關鍵點
SiftKeyPointOrientation[] orientations; //關鍵點對 應的方向及描述
double[] angles = new double[4]; //關鍵點對應的方向(角度)
int angleCount; //某個關鍵點的方向數目
double angle; //方向
float[] descriptors; //關鍵點某個方向的描述
IntPtr ptrDescriptors = Marshal.AllocHGlobal(128 * sizeof(float)); //指向描述的緩沖區指針
//依次遍歷每一階
if (VlFeatInvoke.vl_sift_process_first_octave (ptrSiftFilt, im) != VlFeatInvoke.VL_ERR_EOF)
{
features = new List<SiftFeature> (100);
while (true)
{
//計算每組中的關鍵點
VlFeatInvoke.vl_sift_detect (ptrSiftFilt);
//遍歷每個點
siftFilt = (VlSiftFilt) Marshal.PtrToStructure(ptrSiftFilt, typeof(VlSiftFilt));
pKeyPoints = (VlSiftKeypoint*) siftFilt.keys.ToPointer();
for (int i = 0; i < siftFilt.nkeys; i++)
{
keyPoint = *pKeyPoints;
pKeyPoints++;
orientations = null;
if (resultType == SiftDetectorResultType.Normal || resultType == SiftDetectorResultType.Extended)
{
//計算並遍歷每個點的 方向
angleCount = VlFeatInvoke.vl_sift_calc_keypoint_orientations(ptrSiftFilt, angles, ref keyPoint);
orientations = new SiftKeyPointOrientation[angleCount];
for (int j = 0; j < angleCount; j++)
{
angle = angles[j];
descriptors = null;
if (resultType == SiftDetectorResultType.Extended)
{
//計 算每個方向的描述
VlFeatInvoke.vl_sift_calc_keypoint_descriptor(ptrSiftFilt, ptrDescriptors, ref keyPoint, angle);
descriptors = new float[128];
Marshal.Copy(ptrDescriptors, descriptors, 0, 128);
}
orientations [j] = new SiftKeyPointOrientation(angle, descriptors); //保存關鍵點方向和 描述
}
}
features.Add(new SiftFeature(keyPoint, orientations)); //將得到的特征添加到列表中
}
//下一階
if (VlFeatInvoke.vl_sift_process_next_octave(ptrSiftFilt) == VlFeatInvoke.VL_ERR_EOF)
break;
}
}
//釋放資源
Marshal.FreeHGlobal(ptrDescriptors);
//返回
return features;
}
/// <summary>
/// 進行基本的SIFT檢測,並返回關鍵點列表
/// </summary>
/// <param name="im">單通道浮點型圖像數據,圖像數據不 必歸一化到區間[0,1]</param>
/// <returns>返回關鍵點列表;如果獲取失敗,返回null。 </returns>
public List<SiftFeature> Process(IntPtr im)
{
return Process(im, SiftDetectorResultType.Basic);
}
/// <summary>
/// 進行SIFT檢測,並返回檢測的結果
/// </summary>
/// <param name="image">圖像</param>
/// <param name="resultType">SIFT檢測的結果類型 </param>
/// <returns>返回SIFT檢測結果——SIFT特征列表;如果檢 測失敗,返回null。</returns>
public List<SiftFeature> Process(Image<Gray, Single> image, SiftDetectorResultType resultType)
{
if (image.Width != SiftFilt.width || image.Height != SiftFilt.height)
throw new ArgumentException("圖像的尺寸和構 造函數中指定的尺寸不一致。", "image");
return Process(image.MIplImage.imageData, resultType);
}
/// <summary>
/// 進行基本的SIFT檢測,並返回檢測的結果
/// </summary>
/// <param name="image">圖像</param>
/// <returns>返回SIFT檢測結果——SIFT特征列表;如果檢 測失敗,返回null。</returns>
public List<SiftFeature> Process(Image<Gray, Single> image)
{
return Process(image, SiftDetectorResultType.Basic);
}
/// <summary>
/// 釋放資源
/// </summary>
public void Dispose()
{
if (ptrSiftFilt != IntPtr.Zero)
VlFeatInvoke.vl_sift_delete(ptrSiftFilt);
}
}
/// <summary>
/// SIFT特征
/// </summary>
public struct SiftFeature
{
public VlSiftKeypoint keypoint; //關鍵點
public SiftKeyPointOrientation[] keypointOrientations; //關鍵點的方向及方向對應的描述
public SiftFeature(VlSiftKeypoint keypoint)
: this(keypoint, null)
{
}
public SiftFeature(VlSiftKeypoint keypoint, SiftKeyPointOrientation[] keypointOrientations)
{
this.keypoint = keypoint;
this.keypointOrientations = keypointOrientations;
}
}
/// <summary>
/// Sift關鍵點的方向及描述
/// </summary>
public struct SiftKeyPointOrientation
{
public double angle; //方向
public float[] descriptors; //描述
public SiftKeyPointOrientation(double angle)
: this(angle, null)
{
}
public SiftKeyPointOrientation(double angle, float[] descriptors)
{
this.angle = angle;
this.descriptors = descriptors;
}
}
/// <summary>
/// SIFT檢測的結果
/// </summary>
public enum SiftDetectorResultType
{
Basic, //基本:僅包含關鍵點
Normal, //正常:包含關鍵點、方向
Extended //擴展:包含關鍵點、方向以及描述
}
}
MSER區域
OpenCv中的函數cvExtractMSER以及EmguCv中的 Image<TColor,TDepth>.ExtractMSER方法實現了MSER區域的檢測。由於OpenCv的文檔 中目前還沒有cvExtractMSER這一部分,大家如果要看文檔的話,可以先去看EmguCv的文檔 。
需要注意的是MSER區域的檢測結果是區域中所有的點序列。例如檢測到3個區域, 其中一個區域是從(0,0)到(2,1)的矩形,那麼結果點序列為:(0,0),(1,0),(2,0),(2,1), (1,1),(0,1)。
MSER區域檢測的示例代碼如下:
MSER(區域)特征檢測
private string MserFeatureDetect()
{
//獲取參數
MCvMSERParams mserParam = new MCvMSERParams ();
mserParam.delta = int.Parse(txtMserDelta.Text);
mserParam.maxArea = int.Parse (txtMserMaxArea.Text);
mserParam.minArea = int.Parse (txtMserMinArea.Text);
mserParam.maxVariation = float.Parse (txtMserMaxVariation.Text);
mserParam.minDiversity = float.Parse (txtMserMinDiversity.Text);
mserParam.maxEvolution = int.Parse (txtMserMaxEvolution.Text);
mserParam.areaThreshold = double.Parse (txtMserAreaThreshold.Text);
mserParam.minMargin = double.Parse (txtMserMinMargin.Text);
mserParam.edgeBlurSize = int.Parse (txtMserEdgeBlurSize.Text);
bool showDetail = cbMserShowDetail.Checked;
//計算
Stopwatch sw = new Stopwatch();
sw.Start();
MemStorage storage = new MemStorage();
Seq<Point>[] regions = imageSource.ExtractMSER(null, ref mserParam, storage);
sw.Stop();
//顯示
Image<Bgr, Byte> imageResult = imageSourceGrayscale.Convert<Bgr, Byte>();
StringBuilder sbResult = new StringBuilder();
int idx = 0;
foreach (Seq<Point> region in regions)
{
imageResult.DrawPolyline(region.ToArray(), true, new Bgr(255d, 0d, 0d), 2);
if (showDetail)
{
sbResult.AppendFormat("第{0}區域,包 含{1}個頂點(", idx, region.Total);
foreach (Point pt in region)
sbResult.AppendFormat("{0},", pt);
sbResult.Append(")\r\n");
}
idx++;
}
pbResult.Image = imageResult.Bitmap;
//釋放資源
imageResult.Dispose();
storage.Dispose();
//返回
return string.Format("·MSER區域,用時{0:F05}毫秒, 參數(delta:{1},maxArea:{2},minArea:{3},maxVariation:{4},minDiversity: {5},maxEvolution:{6},areaThreshold:{7},minMargin:{8},edgeBlurSize:{9}) ,檢測到{10}個區域\r\n{11}",
sw.Elapsed.TotalMilliseconds, mserParam.delta, mserParam.maxArea, mserParam.minArea, mserParam.maxVariation, mserParam.minDiversity,
mserParam.maxEvolution, mserParam.areaThreshold, mserParam.minMargin, mserParam.edgeBlurSize, regions.Length, showDetail ? sbResult.ToString() : "");
}
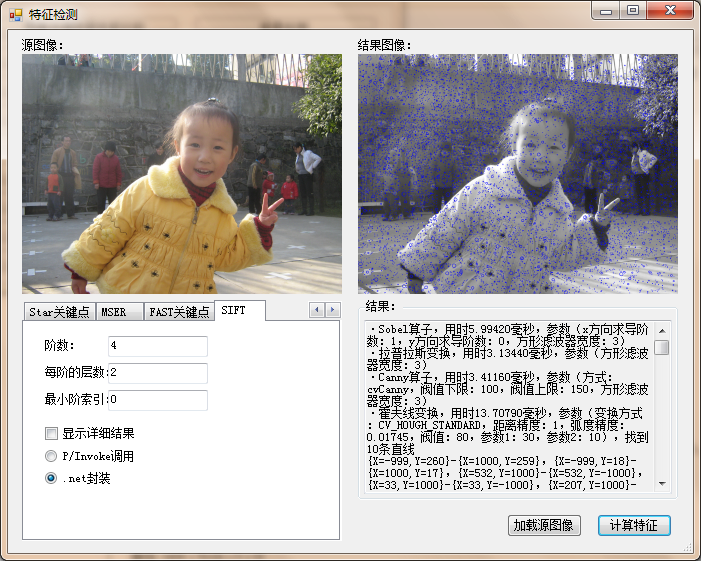
各種特征檢測方法性能對比
上面介紹了這麼多的特征檢測方法,那麼它們的性能到底如何呢?因為它們的參數設置 對處理時間及結果的影響很大,我們在這裡基本都使用默認參數處理同一幅圖像。在我機器 上的處理結果見下表:
特征 用時(毫秒) 特征數目 Sobel算子 5.99420 n/a 拉普拉斯算子 3.13440 n/a Canny算子 3.41160 n/a 霍夫線變換 13.70790 10 霍夫圓變換 78.07720 0 Harris角點 9.41750 n/a ShiTomasi角點 16.98390 18 亞像素級角點 3.63360 18 SURF角點 266.27000 151 Star關鍵點 14.82800 56 FAST角點 31.29670 159 SIFT角點 287.52310 54 MSER區域 40.62970 2
(圖片尺寸:583x301,處理器:AMD ATHLON IIx2 240,內存:DDR3 4G,顯卡: GeForce 9500GT,操作系統:Windows 7)
下一篇文章我們將一起看看如何來跟蹤本文講到的特征點(角點)。