3.4 串操作
我們前面已經提到,內存可以和寄存器交換數據,也可以被賦予立即數。問題是,如果我們需要把內存的某部分內容復制到另一個地址,又怎麼做呢?
設想將DS:SI處的連續512字節內容復制到ES:DI(先不考慮可能的重疊)。也許會有人寫出這樣的代碼:
我不喜歡上面的代碼。它的確能達到作用,但是,效率不好。如果你是在做優化,那麼寫出這樣的代碼意味著賠了夫人又折兵。
Intel的CPU的強項是串操作。所謂串操作就是由CPU去完成某一數量的、重復的內存操作。需要說明的是,我們常用的KMP算法(用於匹配字符串中的模式)的改進——Boyer算法,由於沒有利用串操作,因此在Intel的CPU上的效率並非最優。好的編譯器往往可以利用Intel CPU的這一特性優化代碼,然而,並非所有的時候它都能產生最好的代碼。
某些指令可以加上REP前綴(repeat, 反復之意),這些指令通常被叫做串操作指令。
舉例來說,STOSD指令將EAX的內容保存到ES:DI,同時在DI上加或減四。類似的,STOSB和STOSW分別作1字節或1字的上述操作,在DI上加或減的數是1或2。
計算機語言通常是不允許二義性的。為什麼我要說“加或減”呢?沒錯,孤立地看STOS?指令,並不能知道到底是加還是減,因為這取決於“方向”標志(DF, Direction Flag)。如果DF被復位,則加;反之則減。
置位、復位的指令分別是STD和CLD。
當然,REP只是幾種可用前綴之一。常用的還包括REPNE,這個前綴通常被用來比較兩個串,或搜索某個特定字符(字、雙字)。REPZ、REPE、REPNZ也是非常常用的指令前綴,分別代表ZF(Zero Flag)在不同狀態時重復執行。
下面說三個可以復制數據的指令:
助記符 意義 movsb 將DS:SI的一字節復制到ES:DI,之後SI++、DI++ movsw 將DS:SI的一字節復制到ES:DI,之後SI+=2、DI+=2 movsd 將DS:SI的一字節復制到ES:DI,之後SI+=4、DI+=4於是上面的程序改寫為
cld第一句cld很多時候是多余的,因為實際寫程序時,很少會出現置DF的情況。不過在正式決定刪掉它之前,建議你仔細地調試自己的程序,並確認每一個能夠走到這裡的路徑中都不會將DF置位。
錯誤(非預期的)的DF是危險的。它很可能斷送掉你的程序,因為這直接造成緩沖區溢出問題。
什麼是緩沖區溢出呢?緩沖區溢出分為兩類,一類是寫入緩沖區以外的內容,一類是讀取緩沖區以外的內容。後一種往往更隱蔽,但隨便哪一個都有可能斷送掉你的程序。
緩沖區溢出對於一個網絡服務來說很可能更加危險。懷有惡意的用戶能夠利用它執行自己希望的指令。服務通常擁有更高的特權,而這很可能會造成特權提升;即使不能提升攻擊者擁有的特權,他也可以利用這種問題使服務崩潰,從而形成一次成功的DoS(拒絕服務)攻擊。每年CERT的安全公告中,都有6成左右的問題是由於緩沖區溢出造成的。
在使用匯編語言,或C語言編寫程序時,很容易在無意中引入緩沖區溢出。然而並不是所有的語言都會引入緩沖區溢出問題,Java和C#,由於沒有指針,並且緩沖區采取動態分配的方式,有效地消除了造成緩沖區溢出的土壤。
匯編語言中,由於REP*前綴都用CX作為計數器,因此情況會好一些(當然,有時也會更糟糕,因為由於CX的限制,很可能使原本可能改變程序行為的緩沖區溢出的范圍縮小,從而更為隱蔽)。避免緩沖區溢出的一個主要方法就是仔細檢查,這包括兩方面:設置合理的緩沖區大小,和根據大小編寫程序。除此之外,非常重要的一點就是,在匯編語言這個級別寫程序,你肯定希望去掉所有的無用指令,然而再去掉之前,一定要進行嚴格的測試;更進一步,如果能加上注釋,並通過善用宏來做調試模式檢查,往往能夠達到更好的效果。
3.5 關於保護模式中內存操作的一點說明
正如3.2節提到到的那樣,保護模式中,你可以使用32位的線性地址,這意味著直接訪問4GB的內存。由於這個原因,選擇器不用像實模式中段寄存器那樣頻繁地修改。順便提一句,這份教程中所說的保護模式指的是386以上的保護模式,或者,Microsoft通常稱為“增強模式”的那種。
在為選擇器裝入數值的時候一定要非常小心。錯誤的數值往往會導致無效頁面錯誤(在Windows中經常出現:)。同時,也不要忘記你的地址是32位的,這也是保護模式的主要優勢之一。
現在假設存在一個描述符描述從物理的0:0開始的全部內存,並已經加載進DS(數據選擇器),則我們可以通過下面的程序來操作VGA的VRAM:
mov edi,0a0000h很明顯,這比實模式下的程序
mov ax,0a000h看上去要舒服一些。
3.6 堆棧
到目前為止,您已經了解了基本的寄存器以及內存的操作知識。事實上,您現在已經可以寫出很多的底層數據處理程序了。
下面我來說說堆棧。堆棧實在不是一個讓人陌生的數據結構,它是一個先進後出(FILO)的線性表,能夠幫助你完成很多很好的工作。
先進後出(FILO)是這樣一個概念:最後放進表中的數據在取出時最先出來。先進後出(FILO)和先進先出(FIFO, 和先進後出的規則相反),以及隨機存取是最主要的三種存儲器訪問方式。
對於堆棧而言,最後放入的數據在取出時最先出現。對於子程序調用,特別是遞歸調用來說,這是一個非常有用的特性。
一個鐵桿的匯編語言程序員有時會發現系統提供的寄存器不夠。很顯然,你可以使用普通的內存操作來完成這個工作,就像C/C++中所做的那樣。
沒錯,沒錯,可是,如果數據段(數據選擇器)以及偏移量發生變化怎麼辦?更進一步,如果希望保存某些在這種操作中可能受到影響的寄存器的時候怎麼辦?確實,你可以把他們也存到自己的那片內存中,自己實現堆棧。
太麻煩了……
既然系統提供了堆棧,並且性能比自己寫一份更好,那麼為什麼不直接加以利用呢?
系統堆棧不僅僅是一段內存。由於CPU對它實施管理,因此你不需要考慮堆棧指針的修正問題。可以把寄存器內容,甚至一個立即數直接放到堆棧裡,並在需要的時候將其取出。同時,系統並不要求取出的數據仍然回到原來的位置。
除了顯式地操作堆棧(使用PUSH和POP指令)之外,很多指令也需要使用堆棧,如INT、CALL、LEAVE、RET、RETF、IRET等等。配對使用上述指令並不會造成什麼問題,然而,如果你打算使用LEAVE、RET、RETF、IRET這樣的指令實現跳轉(比JMP更為麻煩,然而有時,例如在加密軟件中,或者需要修改調用者狀態時,這是必要的)的話,那麼我的建議是,先搞清楚它們做的到底是什麼,並且,精確地了解自己要做什麼。
正如前面所說的,有兩個顯式地操作堆棧的指令:
助記符 功能 PUSH 將操作數存入堆棧,同時修正堆棧指針 POP 將棧頂內容取出並存到目的操作數中,同時修正堆棧指針
我們現在來看看堆棧的操作。
執行之前
執行代碼
mov ax,1234h
mov bx,10
push ax
push bx
之後,堆棧的狀態為
之後,再執行
pop dx
pop cx
堆棧的狀態成為
當然,dx、cx中的內容將分別是000ah和1234h。
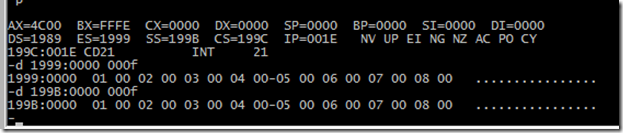
注意,最後這張圖中,我沒有抹去1234h和000ah,因為POP指令並不從內存中抹去數值。不過盡管如此,我個人仍然非常反對繼續使用這兩個數(你可以通過修改SP來再次POP它們),然而這很容易導致錯誤。
一定要保證堆棧段有足夠的空間來執行中斷,以及其他一些隱式的堆棧操作。僅僅統計PUSH的數量並據此計算堆棧所需的大小很可能造成問題。
CALL指令將返回地址放到堆棧中。絕大多數C/C++編譯器提供了“堆棧檢查”這個編譯選項,其作用在於保證C程序段中沒有忘記對堆棧中多余的數據進行清理,從而保證返回地址有效。
本章小結
本章中介紹了內存的操作的一些入門知識。限於篇幅,我不打算展開細講指令,如cmps*,lods*,stos*,等等。這些指令的用法和前面介紹的movs*基本一樣,只是有不同的作用而已。