邊緣檢測是圖像處理和計算機視覺的基本問題,其目的是表示數字圖像中亮度變化明顯的點。圖像屬性中的顯著變化通常反映了屬性的重要事件和變化。邊緣檢測的表現形式如下圖所示: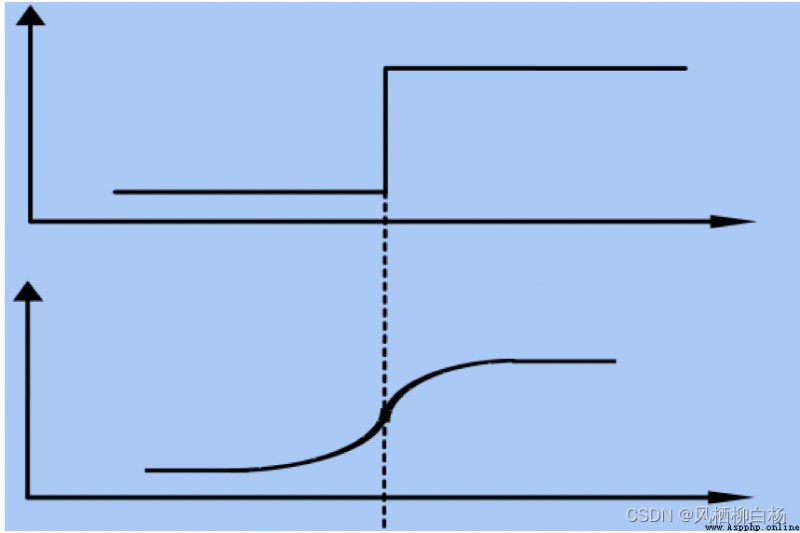
圖像邊緣檢測大幅度減少了數據量,並且剔除了可以認為不相關的信息,保留了圖像重要的結構屬性。有許多方法用於邊緣檢測,它們絕大部分可以被劃分為兩類:基於搜索、基於零穿越
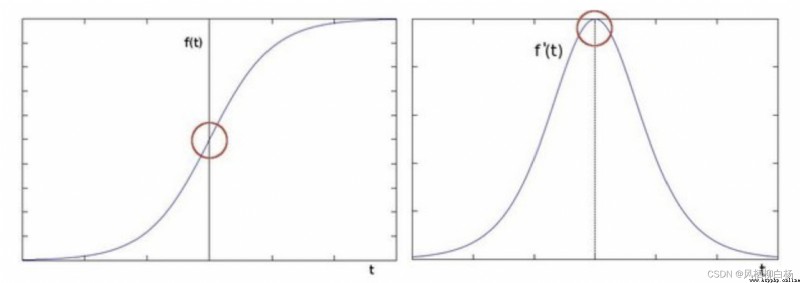
通過尋找圖像的一階導數中的最大值來檢測邊界,然後利用計算結果估計邊緣的局部方向,通常采用梯度的方向,並利用此方向找到局部梯度模的最大值,代表算法有Sobel算子和Scharr算子。
(1)圖像一階導數的最大值 -->
.
(2)邊緣的局部方向(一般梯度方向) -->
.
(3)局部梯度模的最大值
通過尋找圖像二階導數零穿越來尋找邊界,代表算子是laplacian算子。
零點是指函數與y軸的交點。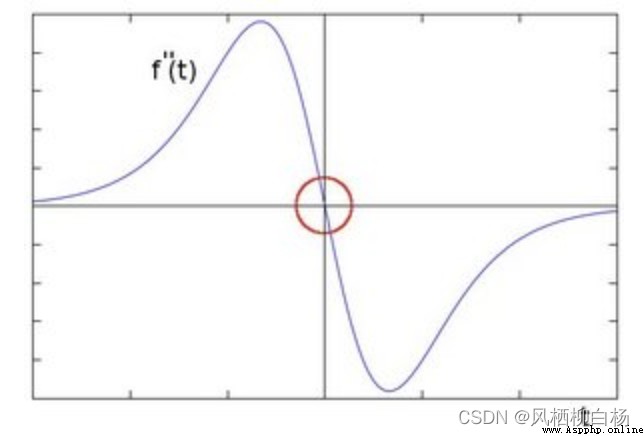
Sobel邊緣檢測算法比較簡單,實際應用中效率要比canny邊緣檢測效果高。但是邊緣不如canny檢測的准確,但是與很多實際應用的場合,Sobel算子是首選。
Sobel算子是高斯平滑與微分操作的結合體,所以其抗噪聲能力很強,用途較多。尤其是效率要求較高,而對細節紋理不太關心的時候。
對於不連續的函數,一階導數可以寫作:
或者
所以有:
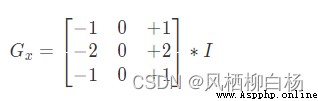
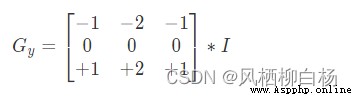
假設要處理的圖像為I,在兩個方向求導
利用OpenCV進行Sobel邊緣檢測的API是:
Sobel_x_or_y =
cv2.Sobel(src, ddepth, dx, dy, dst, ksize, scale, delta, borderType)
參數:
Sobel函數求完導數後會有負值,還會有大於255的值。而原圖像是uint8,即8為無符號數,所以Sobel建立的圖像位數不夠,會有截斷。因此要使用16位有符號的數據類型,即cv2.CV_16s。處理完圖像後,再使用cv2.convertScaleAbs()函數將其轉回原來的uint8類型,否則圖像無法顯示。
Sobel算子是在兩個方向計算的,最後還需要用cv2.addWeighted()函數將其組合起來
Scale_abs = cv2.convertScaleAbs(x) # 格式轉換函數
result = cv2.addWeighted(src1, alpha, src2, beta) # 圖像混合
代碼示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 讀取圖像
img = cv.imread('./image/horse.jpg',0)
# 2 計算Sobel卷積結果
x = cv.Sobel(img, cv.CV_16S, 1, 0)
y = cv.Sobel(img, cv.CV_16S, 0, 1)
# 3 將數據進行轉換
Scale_absX = cv.convertScaleAbs(x) # convert 轉換 scale 縮放
Scale_absY = cv.convertScaleAbs(y)
# 4 結果合成
result = cv.addWeighted(Scale_absX, 0.5, Scale_absY, 0.5, 0)
# 5 圖像顯示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原圖')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(result,cmap = plt.cm.gray),plt.title('Sobel濾波後結果')
plt.xticks([]), plt.yticks([])
plt.show()

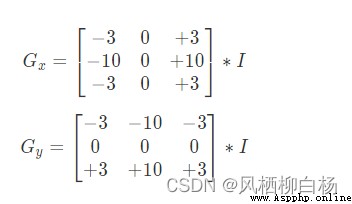
將上述代碼中計算Sobel算子部分的ksize設為-1,就是利用scharr進行邊緣檢測。
x = cv2.Sobel(img, cv2.CV_16S, 1, 0, ksize=-1)
y = cv2.Sobel(img, cv2.CV_16S, 0, 1, ksize=-1)
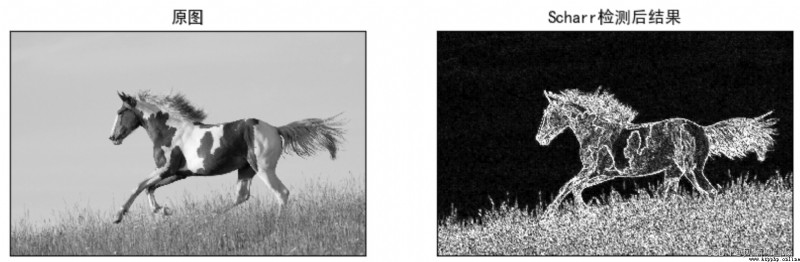
可以看出,使用Scharr算子,檢測效果要比Sobel算子稍微好一點。
Laplacian檢測方法利用二階導數來檢測邊緣。因為圖像是“2維”,因此我們需要在兩個方向求導,如下式所示: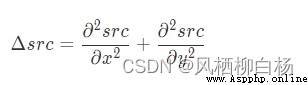
那麼不連續的二階導數是:
那麼使用的卷積核是: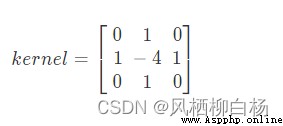
API:
laplacian = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
參數:
代碼示例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 讀取圖像
img = cv.imread('./image/horse.jpg',0)
# 2 laplacian轉換
result = cv.Laplacian(img,cv.CV_16S)
Scale_abs = cv.convertScaleAbs(result)
# 3 圖像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原圖')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(Scale_abs,cmap = plt.cm.gray),plt.title('Laplacian檢測後結果')
plt.xticks([]), plt.yticks([])
plt.show()

canny邊緣檢測算法是一種非常流行的邊緣檢測算法,是John F.Canny與1986年提出的,被認為是最優秀的邊緣檢測算法。
Canny邊緣檢測算法由4步構成,分別介紹如下:
由於邊緣檢測很容易受到噪聲干擾,因此首先使用高斯濾波器去除噪聲。(高斯濾波在圖像平滑中提到過,可以往前翻閱)
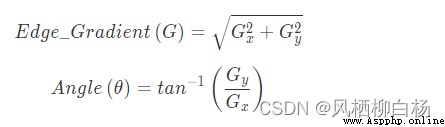
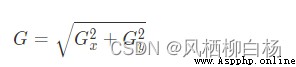
對平滑後的圖像使用Sobel算子計算水平方向和垂直方向的一階導數(Gx和Gy)。根據得到的這兩幅梯度圖(Gx和Gy)找到邊界的梯度和方向,公式如下:
如果某個像素點是邊緣,則其梯度方向總是和邊緣方向垂直。梯度方向被歸為四類:垂直、水平,和兩個對角線方向。
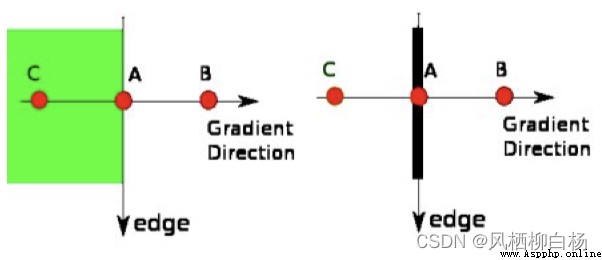
在獲得梯度方向和大小後,對整幅圖像進行掃描,去除那些非邊界上的點。對每個像素進行檢查,看這個點的梯度是不是周圍具有相同梯度方向的點中最大的。如下圖所示:
A點位於圖像的邊緣,在其梯度變化方向,選擇像素點B和C,用來檢驗A點的梯度是否為極大值,若為極大值,則進行保留,否則A點被抑制,最終的結果是具有“細邊”的二進制圖像。
現在要確定真正的邊界。 我們設置兩個阈值: minVal 和 maxVal。 當圖像的灰度梯度高於 maxVal 時被認為是真的邊界, 低於 minVal 的邊界會被拋棄。如果介於兩者之間的話,就要看這個點是否與某個被確定為真正的邊界點相連,如果是就認為它也是邊界點,如果不是就拋棄。如下圖:
如上圖所示,A 高於阈值 maxVal 所以是真正的邊界點,C 雖然低於 maxVal 但高於 minVal 並且與 A 相連,所以也被認為是真正的邊界點。而 B 就會被拋棄,因為低於 maxVal 而且不與真正的邊界點相連。所以選擇合適的 maxVal 和 minVal 對於能否得到好的結果非常重要。
在opencv中藥實現canny檢測使用的API:
canny = cv2.Canny(image, threshold1, threshold2)
參數:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 圖像讀取
img = cv.imread('./image/horse.jpg',0)
# 2 Canny邊緣檢測
lowThreshold = 0
max_lowThreshold = 100
canny = cv.Canny(img, lowThreshold, max_lowThreshold)
# 3 圖像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原圖')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(canny,cmap = plt.cm.gray),plt.title('Canny檢測後結果')
plt.xticks([]), plt.yticks([])
plt.show()