In general visual visual color is madeRGB組成的,To simplify processing the visual complexity,And get the feature shape that segmented the specified object,The binarization method is more efficient and convenient
二值化定義:圖像的二值化,就是將圖像上的像素點的灰度值設置為0或255,也就是將整個圖像呈現出明顯的只有黑和白的視覺效果
Binarization segmentation definition:一幅圖像包括目標物體、背景還有噪聲,要想從多值的數字圖像中直接提取出目標物體,常用的方法就是設定一個阈值T,用T將圖像的數據分成兩部分:大於T的像素群和小於T的像素群.這是研究灰度變換的最特殊的方法,稱為圖像的二值化(Binarization).
1.Simple threshold-(全局阈值):cv2.threshold(src, thresh, maxval, type, dst=None)->retval,dst
參數:
src: 指原圖像,原圖像應該是灰度圖
thresh:二值化的阈值
maxval:超過threshThe maximum value of the pixel value setting
type:Binarization method operation
1)二進制阈值化 THRESH_BINARY
3)截斷阈值化 THRESH_TRUNC
阈值化為0 THRESH_TOZERO
反阈值化為0 THRESH_TOZERO_INV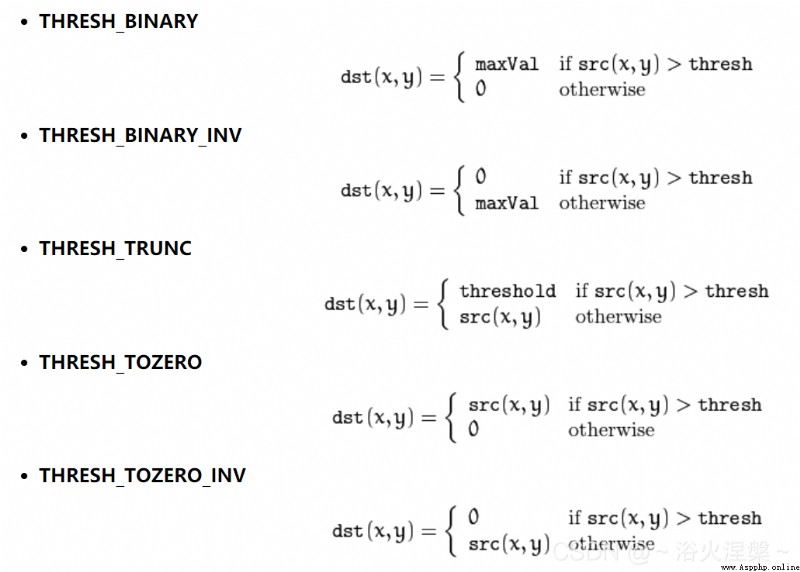
6)Otsu threshold algorithm(OTSU):
簡介:大津法(OTSU)can be based on image properties,選擇最佳的阈值,There is no need to manually provide thresholds,Therefore, it is also considered to be the best algorithm for threshold selection in image segmentation,計算簡單,不受圖像亮度和對比度的影響.從大津法的原理上來講,該方法又稱作最大類間方差法,按照大津法求得的阈值進行圖像二值化分割後,前景與背景圖像的類間方差最大.適合處理所需提取的前景圖像和背景圖像差距較大的圖像.其函數也十分簡單,只需要把阈值thresh設置為0,然後設置type為cv2.THRESH_BINARY+cv2.THRESH_OTSU,會自動返回一個合適的阈值.ret2,th2 =cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
dst - 輸出數組/圖像(與src相同大小和類型以及相同通道數的數組/圖像)
返回值:
2.局部阈值法 : When the color distribution of the image is uneven,Using global thresholding doesn't work very well,This is segmentation using local thresholding,Can produce good results.
局部阈值的處理原理是,針對每一個像素點專門配置一個阈值來進行處理,這些阈值就構成了和原圖像維度相同的矩陣.cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C, dst=None)
參數:
灰度圖像上每個像素的顏色值又稱為灰度,指黑白圖像中點的顏色深度,范圍一般從0到255,白色為255,黑色為0.所謂灰度值是指色彩的濃淡程度,灰度直方圖是指一幅數字圖像中,對應每一個灰度值統計出具有該灰度值的象素數.
There are several ways to grayscale images:

cvtColor(src, code, dst=None, dstCn=None)->gray_image參數:
返回值:
源代碼:
import cv2
import numpy as np
""" Binarization performs background segmentation of images: 1.全局阈值 2.局部阈值:表示自適應阈值算法,平均 (ADAPTIVE_THRESH_MEAN_C)或高斯(ADAPTIVE_THRESH_GAUSSIAN_C) 3.The user calculates the threshold by himself:The median method calculates the threshold 4.HSV阈值的計算 """
def nothing(*arg):
pass
# 全局阈值
def threshold_demo(image, threshold_value):
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY) # 把輸入圖像灰度化
# 直接阈值化(對輸入的單通道矩陣逐像素進行阈值分割)Represents a binarized combinationTRIANGLE法,全局自適應阈值,第二個參數值0可改為任意數字但不起作用,適用於單個波峰.
ret, binary = cv2.threshold(gray, threshold_value, 255, cv2.THRESH_BINARY)
print("threshold value %s" % ret)
cv2.namedWindow("binary0", cv2.WINDOW_NORMAL)
cv2.imshow("binary0", binary)
# 局部阈值:表示自適應阈值算法,平均 (ADAPTIVE_THRESH_MEAN_C)或高斯(ADAPTIVE_THRESH_GAUSSIAN_C).
def local_threshold(image):
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY) # 把輸入圖像灰度化
# Adaptive thresholding can be based on the brightness distribution of different regions of the image,改變阈值
# 第三個參數必須為THRESH_BINARY或THRESH_BINARY_INV的阈值類型
# 第四個參數blockSizeThe parameter represents the block size(奇數且大於1,比如3,5,7........ ).
# The last parameter is a constant,表示從平均值或加權平均值中減去的數
# 補充:在使用平均和高斯兩種算法情況下,通過計算每個像素周圍blockSize x blockSize大小像素塊的加權均值並減去常量C即可得到自適應阈值.如果使用平均的方法,則所有像素周圍的權值相同;如果使用高斯的方法,則每個像素周圍像素的權值則根據其到中心點的距離通過高斯方程得到.
binary = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 25, 10)
cv2.namedWindow("binary1", cv2.WINDOW_NORMAL)
cv2.imshow("binary1", binary)
# The user calculates the threshold by himself:The median method calculates the threshold
def custom_threshold(image):
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY) # 把輸入圖像灰度化
h, w = gray.shape[:2]
m = np.reshape(gray, [1, w * h])
mean = m.sum() / (w * h)
print("mean:", mean)
ret, binary = cv2.threshold(gray, mean, 255, cv2.THRESH_BINARY)
cv2.namedWindow("binary2", cv2.WINDOW_NORMAL)
cv2.imshow("binary2", binary)
# HSVThreshold adjustment,這裡也可以通過HSVto adjust the image threshold
def HSV():
cap = cv2.VideoCapture(0)
# set blue thresh 設置HSV中藍色、天藍色范圍
lower_blue = np.array([78, 43, 46])
upper_blue = np.array([110, 255, 255])
while True:
# get a frame and show Get video frames and convert toHSV格式, 利用cvtColor()將BGR格式轉成HSV格式,參數為cv2.COLOR_BGR2HSV.
ret, frame = cap.read()
cv2.imshow('Capture', frame)
# change to hsv model
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# get mask 利用inRange()函數和HSVGet the upper and lower bounds of the blue range in the modelmask,maskThe blue part of the Zhongyuan video will be rendered white,Other parts are black.
mask = cv2.inRange(hsv, lower_blue, upper_blue)
cv2.imshow('Mask', mask)
# detect blue 將maskPerform a bitwise AND operation on the original video frame,則會把maskThe white in the is replaced with the real image:
res = cv2.bitwise_and(frame, frame, mask=mask)
cv2.imshow('Result', res)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
cv2.namedWindow('colorThreshold')
cv2.createTrackbar('threshold_value', 'colorThreshold', 0, 255, nothing)
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
threshold_value = cv2.getTrackbarPos('threshold_value', 'colorThreshold')
threshold_demo(frame, threshold_value)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
效果:
Adjusted final threshold:
The segmented background image: