Kalman The filter is really too complicated , So I organized this article , To record some useful reference links .
If I use my own words to sum up kalman filter ( May not be accurate ):
Kalman Track intuitive feelings
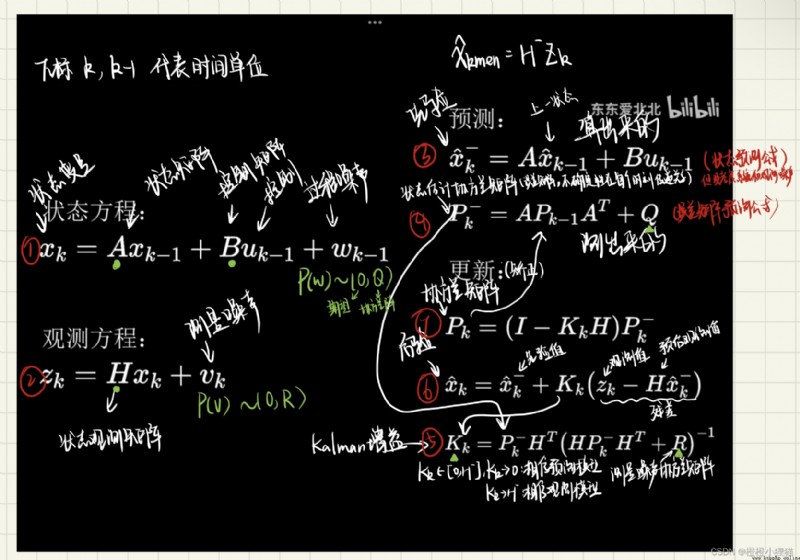
Kalman principle
Kalman application
opencv official kalman Function description
cv::KalmanFilter Class Reference
I wrote a class myself
The input values are the center coordinates, length and width of the target , Enter the predicted coordinate position and speed , There may be some errors , It needs to be revised later .
import cv2
import numpy as np
# from myUtils.utils import xyxy_to_xywh
class KalmanTrack:
def __init__(self):
# The number of States and observations needs to be modified
self.kalman = cv2.KalmanFilter(6, 4) # 6: Number of States , Include (xmin,ymin,xmax,ymax, dx,dy) Coordinates and speed ( The distance of each move );
# 4: Observation and measurement , What you can see is the coordinate value
# State transition matrix
A = np.array([[1, 0, 0, 0, 1, 0],
[0, 1, 0, 0, 0, 1],
[0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 1]], np.float32)
self.kalman.transitionMatrix = A # State transition matrix
# Control matrix
B = None
self.kalman.controlMatrix = B
# State observation matrix
H = np.array([[1, 0, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0]], np.float32)
self.kalman.measurementMatrix = H # System measurement matrix
# Observation noise covariance matrix R,p(v)~N(0,R)
# The observation noise comes from the loss of detection frame 、 Overlap, etc.
R = np.array([[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]], np.float32)
self.kalman.measurementNoiseCov = R
# Process noise covariance matrix Q,p(w)~N(0,Q), Noise comes from uncertainty in the real world ,
# In the tracking task , The process noise comes from the uncertainty of target movement ( A sudden acceleration 、 Slow down 、 Turn, etc )
Q = np.eye(6, dtype=np.float32) * 0.1
self.kalman.processNoiseCov = Q
# Covariance matrix of state estimation P initialization
P = np.eye(6, dtype=np.float32)
self.kalman.errorCovPre = P
self.cur_measurement = np.nan
self.cur_prediction = np.nan
self.pre_measurement = np.nan
self.pre_prediction = np.nan
def get_cur_state(self, target_box):
""" Get the initial value state measurement value """
# target_box = [729, 238, 764, 339]
self.cur_measurement = target_box # Target initial bouding box
# self.cur_measurement = xyxy_to_xywh(self.cur_measurement)
# [ center x, center y, wide w, high h]
self.cur_measurement = np.array(
[[np.float32(self.cur_measurement[0]), np.float32(self.cur_measurement[1]),
np.float32(self.cur_measurement[2]), np.float32(self.cur_measurement[3])]]).T
return self.cur_measurement
def get_initial_state(self, target_box):
self.cur_measurement = self.get_cur_state(target_box)
self.pre_measurement = self.cur_measurement
self.cur_prediction = self.cur_measurement
self.pre_prediction = self.cur_measurement
def correct_and_predict(self, target_box):
# Store the front line status
self.pre_measurement = self.cur_measurement
self.pre_prediction = self.cur_prediction
# Use the current measurement to correct the Kalman filter
self.cur_measurement = self.get_cur_state(target_box)
self.kalman.correct(self.cur_measurement) # Use the current measurement to correct the Kalman filter
self.cur_prediction = self.kalman.predict() # Calculate the Kalman prediction value , As a current forecast
return self.cur_prediction
if __name__ == '__main__':
kalman_tracker = KalmanTrack()
kalman_tracker.get_initial_state([729, 288, 35, 101]) # xywh
while True:
# Take the previous predicted value as the current measured value
data = list([kalman_tracker.pre_prediction[0][0], kalman_tracker.pre_prediction[1][0],
kalman_tracker.pre_prediction[2][0], kalman_tracker.pre_prediction[3][0]])
print(kalman_tracker.correct_and_predict(data))