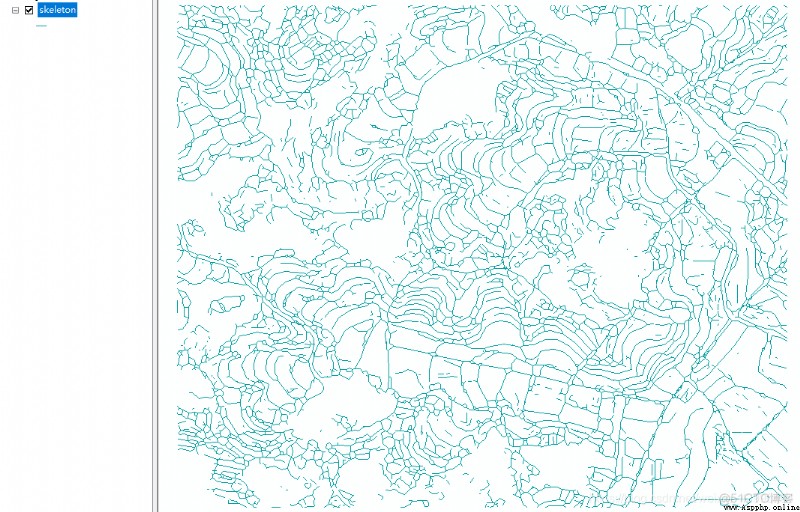
本博文將介紹如何將柵格線轉化成矢量線的方法。大致流程可分為,柵格線轉圖結構表示,再由圖結構的點關系,寫入進線矢量。
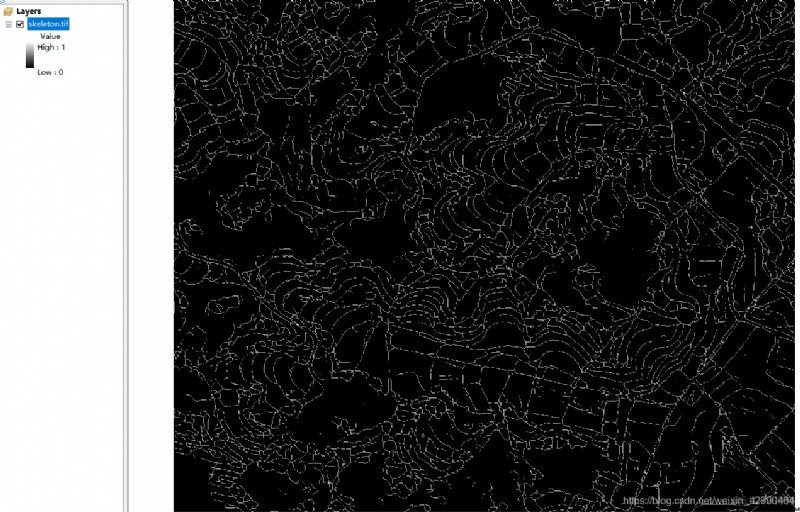
image2graph.py
# import rdp
# Code Copied From Favyen
import scipy. ndimage
import skimage. morphology
import os
from PIL import Image
import cv2
import math
import numpy
from math import sqrt
import pickle
import gdalTools
def distance( a, b):
return sqrt(( a[ 0] - b[ 0]) * * 2 + ( a[ 1] - b[ 1]) * * 2)
def point_line_distance( point, start, end):
if ( start == end):
return distance( point, start)
else:
n = abs(
( end[ 0] - start[ 0]) * ( start[ 1] - point[ 1]) - ( start[ 0] - point[ 0]) * ( end[ 1] - start[ 1])
)
d = sqrt(
( end[ 0] - start[ 0]) * * 2 + ( end[ 1] - start[ 1]) * * 2
)
return n / d
def rdp( points, epsilon):
"""
Reduces a series of points to a simplified version that loses detail, but
maintains the general shape of the series.
"""
dmax = 0.0
index = 0
for i in range( 1, len( points) - 1):
d = point_line_distance( points[ i], points[ 0], points[ - 1])
if d > dmax:
index = i
dmax = d
if dmax >= epsilon:
results = rdp( points[: index + 1], epsilon)[: - 1] + rdp( points[ index:], epsilon)
else:
results = [ points[ 0], points[ - 1]]
return results
def generateGraph( in_fname):
PADDING = 30
threshold = 1
out_fname = 'graph_gt.pickle'
im_proj, im_geotrans, im_width, im_height, im_data = gdalTools. read_img( in_fname)
im = im_data
im = numpy. array( im)
if len( im. shape) == 3:
print( 'warning: bad shape {}, using first channel only'. format( im. shape))
im = im[:, :, 0]
im = numpy. swapaxes( im, 0, 1)
im = ( im >= threshold)
Image. fromarray( im. astype( 'uint8') * 60). save( "tmp0.png")
im = skimage. morphology. thin( im)
im = im. astype( 'uint8')
Image. fromarray( im * 255). save( "tmp.png")
# extract a graph by placing vertices every THRESHOLD pixels, and at all intersections
vertices = []
edges = set()
def add_edge( src, dst):
if ( src, dst) in edges or ( dst, src) in edges:
return
elif src == dst:
return
edges. add(( src, dst))
point_to_neighbors = {}
q = []
while True:
if len( q) > 0:
lastid, i, j = q. pop()
path = [ vertices[ lastid], ( i, j)]
if im[ i, j] == 0:
continue
point_to_neighbors[( i, j)]. remove( lastid)
if len( point_to_neighbors[( i, j)]) == 0:
del point_to_neighbors[( i, j)]
else:
w = numpy. where( im > 0)
if len( w[ 0]) == 0:
break
i, j = w[ 0][ 0], w[ 1][ 0]
lastid = len( vertices)
vertices. append(( i, j))
path = [( i, j)]
while True:
im[ i, j] = 0
neighbors = []
for oi in [ - 1, 0, 1]:
for oj in [ - 1, 0, 1]:
ni = i + oi
nj = j + oj
if ni >= 0 and ni < im. shape[ 0] and nj >= 0 and nj < im. shape[ 1] and im[ ni, nj] > 0:
neighbors. append(( ni, nj))
if len( neighbors) == 1 and ( i, j) not in point_to_neighbors:
ni, nj = neighbors[ 0]
path. append(( ni, nj))
i, j = ni, nj
else:
if len( path) > 1:
path = rdp( path, 2)
if len( path) > 2:
for point in path[ 1: - 1]:
curid = len( vertices)
vertices. append( point)
add_edge( lastid, curid)
lastid = curid
neighbor_count = len( neighbors) + len( point_to_neighbors. get(( i, j), []))
if neighbor_count == 0 or neighbor_count >= 2:
curid = len( vertices)
vertices. append( path[ - 1])
add_edge( lastid, curid)
lastid = curid
for ni, nj in neighbors:
if ( ni, nj) not in point_to_neighbors:
point_to_neighbors[( ni, nj)] = set()
point_to_neighbors[( ni, nj)]. add( lastid)
q. append(( lastid, ni, nj))
for neighborid in point_to_neighbors. get(( i, j), []):
add_edge( neighborid, lastid)
break
neighbors = {}
# print(vertices)
# with open(out_fname, 'w') as f:
# for vertex in vertices:
# f.write('{} {}\n'.format(vertex[0], vertex[1]))
# f.write('\n')
vertex = vertices
for edge in edges:
nk1 = ( vertex[ edge[ 0]][ 1], vertex[ edge[ 0]][ 0])
nk2 = ( vertex[ edge[ 1]][ 1], vertex[ edge[ 1]][ 0])
if nk1 != nk2:
if nk1 in neighbors:
if nk2 in neighbors[ nk1]:
pass
else:
neighbors[ nk1]. append( nk2)
else:
neighbors[ nk1] = [ nk2]
if nk2 in neighbors:
if nk1 in neighbors[ nk2]:
pass
else:
neighbors[ nk2]. append( nk1)
else:
neighbors[ nk2] = [ nk1]
# f.write('{} {}\n'.format(edge[0], edge[1]))
# f.write('{} {}\n'.format(edge[1], edge[0]))
# print(neighbors)
# pickle.dump(neighbors, open(out_fname, "wb"))
return neighbors
raster2lineShp.py
import gdalTools
import numpy as np
from skimage import morphology
import cv2 as cv
from osgeo import gdalconst, gdal, ogr, osr
import os
from image2graph import *
def imagexy2geo( dataset, col, row):
'''
根據GDAL的六參數模型將影像圖上坐標(行列號)轉為投影坐標或地理坐標(根據具體數據的坐標系統轉換)
:param dataset: GDAL地理數據
:param row: 像素的行號
:param col: 像素的列號
:return: 行列號(row, col)對應的投影坐標或地理坐標(x, y)
'''
trans = dataset. GetGeoTransform()
px = trans[ 0] + col * trans[ 1] + row * trans[ 2]
py = trans[ 3] + col * trans[ 4] + row * trans[ 5]
return px, py
def raster2LineShp( img_path, strVectorFile):
graph = generateGraph( img_path)
dataset = gdal. Open( img_path)
gdal. SetConfigOption( "GDAL_FILENAME_IS_UTF8", "NO") # 為了支持中文路徑
gdal. SetConfigOption( "SHAPE_ENCODING", "CP936") # 為了使屬性表字段支持中文
ogr. RegisterAll()
strDriverName = "ESRI Shapefile" # 創建數據,這裡創建ESRI的shp文件
oDriver = ogr. GetDriverByName( strDriverName)
if oDriver == None:
print( "%s 驅動不可用!\n", strDriverName)
oDS = oDriver. CreateDataSource( strVectorFile) # 創建數據源
if oDS == None:
print( "創建文件【%s】失敗!", strVectorFile)
# srs = osr.SpatialReference() # 創建空間參考
# srs.ImportFromEPSG(4326) # 定義地理坐標系WGS1984
srs = osr. SpatialReference(
wkt = dataset. GetProjection()) # 我在讀柵格圖的時候增加了輸出dataset,這裡就可以不用指定投影,實現全自動了,上面兩行可以注釋了,並且那個proj參數也可以去掉了,你們自己去掉吧
papszLCO = []
# 創建圖層,創建一個多邊形圖層,"TestPolygon"->屬性表名
oLayer = oDS. CreateLayer( "TestPolygon", srs, ogr. wkbMultiLineString, papszLCO)
if oLayer == None:
print( "圖層創建失敗!\n")
oDefn = oLayer. GetLayerDefn() # 定義要素
oFeatureTriangle = ogr. Feature( oDefn)
# 創建單個面
for n, v in graph. items():
# if cls > len(cls_dict) - 1:
# continue
for nei in v:
line = ogr. Geometry( ogr. wkbLinearRing) # 構建幾何類型:線
nx, ny = n[ 1], n[ 0]
nx, ny = imagexy2geo( dataset, nx, ny)
line. AddPoint( nx, ny) # 添加點01
neix, neiy = nei[ 1], nei[ 0]
neix, neiy = imagexy2geo( dataset, neix, neiy)
line. AddPoint( neix, neiy) # 添加點02
# yard = ogr.Geometry(ogr.wkbLineString) # 構建幾何類型:多邊形
# yard.AddGeometry(line)
# yard.CloseRings()
# geomTriangle = ogr.CreateGeometryFromWkt(str(line)) # 將封閉後的多邊形集添加到屬性表
oFeatureTriangle. SetGeometry( line)
oLayer. CreateFeature( oFeatureTriangle)
oDS. Destroy()
if __name__ == '__main__':
rasterPath = './temp/skeleton.tif'
shpPath = './temp/skeleton.shp'
raster2LineShp( rasterPath, shpPath)