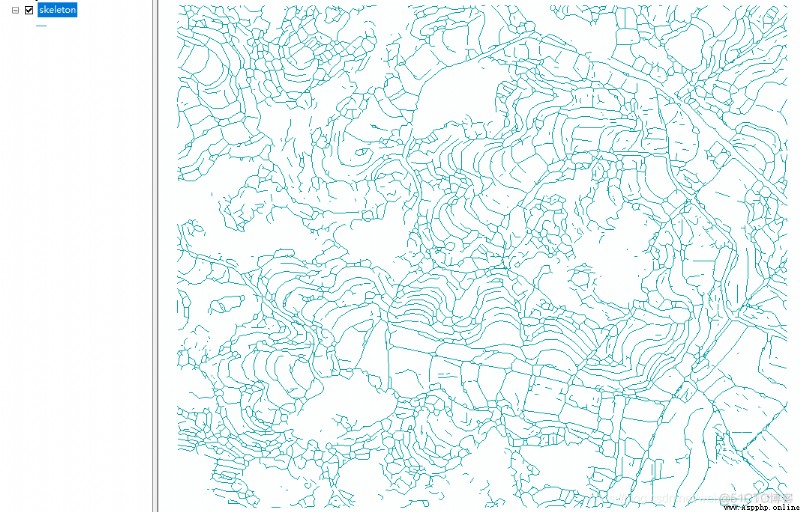
Cet article décrit comment convertir les lignes de grille en lignes vectorielles.Le processus général peut être divisé en:,Représentation de la structure de la grille,Ensuite, la relation ponctuelle de la structure graphique,Écrire un vecteur entrant.
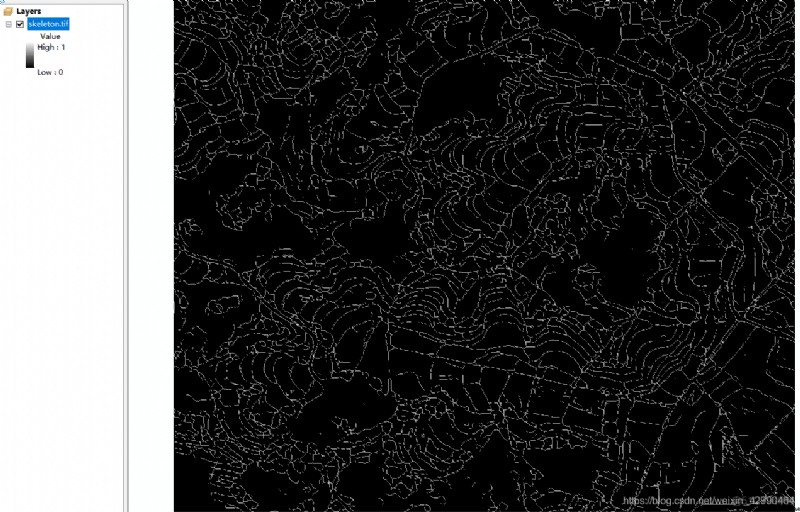
image2graph.py
# import rdp
# Code Copied From Favyen
import scipy. ndimage
import skimage. morphology
import os
from PIL import Image
import cv2
import math
import numpy
from math import sqrt
import pickle
import gdalTools
def distance( a, b):
return sqrt(( a[ 0] - b[ 0]) * * 2 + ( a[ 1] - b[ 1]) * * 2)
def point_line_distance( point, start, end):
if ( start == end):
return distance( point, start)
else:
n = abs(
( end[ 0] - start[ 0]) * ( start[ 1] - point[ 1]) - ( start[ 0] - point[ 0]) * ( end[ 1] - start[ 1])
)
d = sqrt(
( end[ 0] - start[ 0]) * * 2 + ( end[ 1] - start[ 1]) * * 2
)
return n / d
def rdp( points, epsilon):
"""
Reduces a series of points to a simplified version that loses detail, but
maintains the general shape of the series.
"""
dmax = 0.0
index = 0
for i in range( 1, len( points) - 1):
d = point_line_distance( points[ i], points[ 0], points[ - 1])
if d > dmax:
index = i
dmax = d
if dmax >= epsilon:
results = rdp( points[: index + 1], epsilon)[: - 1] + rdp( points[ index:], epsilon)
else:
results = [ points[ 0], points[ - 1]]
return results
def generateGraph( in_fname):
PADDING = 30
threshold = 1
out_fname = 'graph_gt.pickle'
im_proj, im_geotrans, im_width, im_height, im_data = gdalTools. read_img( in_fname)
im = im_data
im = numpy. array( im)
if len( im. shape) == 3:
print( 'warning: bad shape {}, using first channel only'. format( im. shape))
im = im[:, :, 0]
im = numpy. swapaxes( im, 0, 1)
im = ( im >= threshold)
Image. fromarray( im. astype( 'uint8') * 60). save( "tmp0.png")
im = skimage. morphology. thin( im)
im = im. astype( 'uint8')
Image. fromarray( im * 255). save( "tmp.png")
# extract a graph by placing vertices every THRESHOLD pixels, and at all intersections
vertices = []
edges = set()
def add_edge( src, dst):
if ( src, dst) in edges or ( dst, src) in edges:
return
elif src == dst:
return
edges. add(( src, dst))
point_to_neighbors = {}
q = []
while True:
if len( q) > 0:
lastid, i, j = q. pop()
path = [ vertices[ lastid], ( i, j)]
if im[ i, j] == 0:
continue
point_to_neighbors[( i, j)]. remove( lastid)
if len( point_to_neighbors[( i, j)]) == 0:
del point_to_neighbors[( i, j)]
else:
w = numpy. where( im > 0)
if len( w[ 0]) == 0:
break
i, j = w[ 0][ 0], w[ 1][ 0]
lastid = len( vertices)
vertices. append(( i, j))
path = [( i, j)]
while True:
im[ i, j] = 0
neighbors = []
for oi in [ - 1, 0, 1]:
for oj in [ - 1, 0, 1]:
ni = i + oi
nj = j + oj
if ni >= 0 and ni < im. shape[ 0] and nj >= 0 and nj < im. shape[ 1] and im[ ni, nj] > 0:
neighbors. append(( ni, nj))
if len( neighbors) == 1 and ( i, j) not in point_to_neighbors:
ni, nj = neighbors[ 0]
path. append(( ni, nj))
i, j = ni, nj
else:
if len( path) > 1:
path = rdp( path, 2)
if len( path) > 2:
for point in path[ 1: - 1]:
curid = len( vertices)
vertices. append( point)
add_edge( lastid, curid)
lastid = curid
neighbor_count = len( neighbors) + len( point_to_neighbors. get(( i, j), []))
if neighbor_count == 0 or neighbor_count >= 2:
curid = len( vertices)
vertices. append( path[ - 1])
add_edge( lastid, curid)
lastid = curid
for ni, nj in neighbors:
if ( ni, nj) not in point_to_neighbors:
point_to_neighbors[( ni, nj)] = set()
point_to_neighbors[( ni, nj)]. add( lastid)
q. append(( lastid, ni, nj))
for neighborid in point_to_neighbors. get(( i, j), []):
add_edge( neighborid, lastid)
break
neighbors = {}
# print(vertices)
# with open(out_fname, 'w') as f:
# for vertex in vertices:
# f.write('{} {}\n'.format(vertex[0], vertex[1]))
# f.write('\n')
vertex = vertices
for edge in edges:
nk1 = ( vertex[ edge[ 0]][ 1], vertex[ edge[ 0]][ 0])
nk2 = ( vertex[ edge[ 1]][ 1], vertex[ edge[ 1]][ 0])
if nk1 != nk2:
if nk1 in neighbors:
if nk2 in neighbors[ nk1]:
pass
else:
neighbors[ nk1]. append( nk2)
else:
neighbors[ nk1] = [ nk2]
if nk2 in neighbors:
if nk1 in neighbors[ nk2]:
pass
else:
neighbors[ nk2]. append( nk1)
else:
neighbors[ nk2] = [ nk1]
# f.write('{} {}\n'.format(edge[0], edge[1]))
# f.write('{} {}\n'.format(edge[1], edge[0]))
# print(neighbors)
# pickle.dump(neighbors, open(out_fname, "wb"))
return neighbors
raster2lineShp.py
import gdalTools
import numpy as np
from skimage import morphology
import cv2 as cv
from osgeo import gdalconst, gdal, ogr, osr
import os
from image2graph import *
def imagexy2geo( dataset, col, row):
'''
SelonGDAL Le modèle à six paramètres de l'image placera les coordonnées (Numéro de colonne) Convertir en coordonnées projetées ou géographiques ( Conversion du système de coordonnées à partir de données spécifiques )
:param dataset: GDALDonnées géographiques
:param row: Numéro de ligne du Pixel
:param col: Numéro de colonne du Pixel
:return: Numéro de colonne(row, col) Coordonnées projetées ou géographiques correspondantes (x, y)
'''
trans = dataset. GetGeoTransform()
px = trans[ 0] + col * trans[ 1] + row * trans[ 2]
py = trans[ 3] + col * trans[ 4] + row * trans[ 5]
return px, py
def raster2LineShp( img_path, strVectorFile):
graph = generateGraph( img_path)
dataset = gdal. Open( img_path)
gdal. SetConfigOption( "GDAL_FILENAME_IS_UTF8", "NO") # Pour soutenir les chemins chinois
gdal. SetConfigOption( "SHAPE_ENCODING", "CP936") # Pour que les champs de la Feuille de propriétés supportent le chinois
ogr. RegisterAll()
strDriverName = "ESRI Shapefile" # Créer des données,Créer iciESRIDeshpDocumentation
oDriver = ogr. GetDriverByName( strDriverName)
if oDriver == None:
print( "%s L'entraînement n'est pas disponible !\n", strDriverName)
oDS = oDriver. CreateDataSource( strVectorFile) # Créer une source de données
if oDS == None:
print( "Créer un fichier【%s】Échec!", strVectorFile)
# srs = osr.SpatialReference() # Créer une référence spatiale
# srs.ImportFromEPSG(4326) # Définir le système de coordonnées géographiques WGS1984
srs = osr. SpatialReference(
wkt = dataset. GetProjection()) # J'ai augmenté la sortie en lisant la grille dataset, Ici, vous n'avez pas besoin de spécifier la projection , Entièrement automatique , Les deux lignes ci - dessus peuvent être annotées ,Et celui - làproj Les paramètres peuvent également être supprimés , Enlevez - le vous - mêmes
papszLCO = []
# Créer un calque, Créer une couche polygonale ,"TestPolygon"-> Nom de la Feuille de propriétés
oLayer = oDS. CreateLayer( "TestPolygon", srs, ogr. wkbMultiLineString, papszLCO)
if oLayer == None:
print( " La création du calque a échoué !\n")
oDefn = oLayer. GetLayerDefn() # Définir les éléments
oFeatureTriangle = ogr. Feature( oDefn)
# Créer une seule face
for n, v in graph. items():
# if cls > len(cls_dict) - 1:
# continue
for nei in v:
line = ogr. Geometry( ogr. wkbLinearRing) # Construire un type de géométrie :Ligne
nx, ny = n[ 1], n[ 0]
nx, ny = imagexy2geo( dataset, nx, ny)
line. AddPoint( nx, ny) # Ajouter un point01
neix, neiy = nei[ 1], nei[ 0]
neix, neiy = imagexy2geo( dataset, neix, neiy)
line. AddPoint( neix, neiy) # Ajouter un point02
# yard = ogr.Geometry(ogr.wkbLineString) # Construire un type de géométrie :Polygone
# yard.AddGeometry(line)
# yard.CloseRings()
# geomTriangle = ogr.CreateGeometryFromWkt(str(line)) # Ajouter un polygone fermé à la Feuille de propriétés
oFeatureTriangle. SetGeometry( line)
oLayer. CreateFeature( oFeatureTriangle)
oDS. Destroy()
if __name__ == '__main__':
rasterPath = './temp/skeleton.tif'
shpPath = './temp/skeleton.shp'
raster2LineShp( rasterPath, shpPath)