This paper records the use of python Write messages that use custom messages ros Some problems with subscribers and publishers .
Make a statement , The code of this article is intercepted from your own project , Not suitable for direct use , Only suitable as a reference template
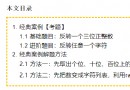
The file structure is as shown in the figure :
catkin_ws
├── build
├── devel
└── src
├── robot_msgs
│ ├── CMakeLists.txt
│ ├── msg
│ │ └── Controldata.msg
│ └── package.xml
└── tcp_ros
└── script
└── test.py
catkin_ws There are two in the workspace package, One is only used to store messages ( You can add more messages by yourself ), One for storing code .
Controldata.msg The message file is as follows :
uint32 cmd
float32 param1
float32 param2
stay robot_msgs In the bag CMakerList.txt:
cmake_minimum_required(VERSION 2.8.3)
project(robot_msgs)
# Add dependency here message_generation Used to generate messages
find_package(catkin REQUIRED COMPONENTS
message_generation
std_msgs
geometry_msgs
)
# Add message file here Controldata.msg
add_message_files(
DIRECTORY msg
FILES
Controldata.msg
)
generate_messages(DEPENDENCIES std_msgs geometry_msgs)
# Message generation package is added here message_runtime
catkin_package(CATKIN_DEPENDS message_runtime std_msgs geometry_msgs)
stay robot_msgs In the bag package.xml Add the following :
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
stay tcp_ros In the bag CMakerList:
find_package(catkin REQUIRED COMPONENTS # lookup robot_msgs package
roscpp
rospy
std_msgs
robot_msgs
)
catkin_package( # contain robot_msgs package
INCLUDE_DIRS include
LIBRARIES tjurobot
CATKIN_DEPENDS roscpp rospy std_msgs robot_msgs message_runtime
DEPENDS system_lib
)
Publisher program : The key is how to python There are other... Imported in the node package Of msg file !!
#!/usr/bin/env python
# license removed for brevity
import rospy
from robot_msgs.msg import Controldata # Translated into : from robot_msgs In the bag msg Import a folder named Controldata Of msg file !
def talker():
pub = rospy.Publisher('chatter', Controldata, queue_size=10) # Set the publishing topic to be named “chatter”, The message type is Controldata.msg, The maximum message queue capacity is 10 The object of the frame pub
rospy.init_node('talker', anonymous=True) # The initialization name is “talker” The node of
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
send_msg = Controldata() # Initialize a message structure : Directly with this msg File name as a function
send_msg.cmd =0X15 # to send_msg Parameter assignment in the structure ( That is the msg Parameters in the file )
send_msg.param1 = 123
send_msg.param2 = 0
pub.publish(send_msg) # call pub Object's publish Function publishing topic
rate.sleep() # During the cycle, you can use just the right sleep time to maintain the desired rate , Applicable to topics that need to be published constantly
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
Subscriber program : The key is how to use topic data in callback function
#!/usr/bin/env python
import rospy
from robot_msgs.msg import Controldata
def callback_fuc(data): # The data Is equivalent to the publisher's send_msg Structure
rospy.loginfo("I heard %d,%d,%d", data.cmd,data.param1,data.param2)
def listener():
rospy.init_node('listener', anonymous=True) # The initialization name is “listener” Subscriber node for :anonymous=True A unique name will be generated for the node to avoid duplicate node names
rospy.Subscriber("chatter", Controldata, callback_fuc) # Set subscriber properties : Subscribed topic name “chatter”, The topic corresponds to msg Message file name , Callback function name
rospy.spin() # There must be , Otherwise, we can't receive , But it will be equivalent to an endless loop, and the program will get stuck here
if __name__ == '__main__':
listener()
About how to solve rospy.spin() For the problem that the post program is stuck and cannot be executed, please refer to this blog :
(94 Bar message ) solve rospy.spin() Cycle all the time , Unable to execute remaining programs _DLUT_ Xiaodingdang's blog -CSDN Blog _rospy.spin