Robot is a highly complex systematic implementation , Various sensors may be integrated into the robot ( radar 、 camera 、GPS…) And the realization of motion control , To understand the coupling , stay ROS Each function point in is a separate process , Each process runs independently .
More precisely ,ROS Is a process ( Also known as Nodes) The distributed framework of . Because these processes can even be distributed on different hosts , Different hosts work together , So as to disperse the calculated pressure . But then there is a problem : How different processes communicate ? That is, how to realize data exchange between different processes ? Here we need to introduce ROS Communication mechanism in .
ROS The basic communication mechanism in mainly has the following three implementation strategies :
Topic communication is ROS One of the most frequently used communication modes in , Topic communication is based on publish subscribe mode , That is to say : A node publishes messages , Another node subscribes to the message . The application scenarios of topic communication are also extremely extensive , For example, the following common scenario :
The robot is performing a navigation function , The sensor used is lidar , The robot will collect the information sensed by the lidar and calculate , Then the motion control information is generated to drive the robot chassis to move .
In the above scenario , Topic communication has been used more than once .
ROS There is a node in the system that needs to publish the data collected by the current radar from time to time , There are also nodes in the navigation module that subscribe to and analyze radar data .And so on , Like radar 、 camera 、GPS… And so on, some sensor data collection , They also use topic communication , In other words , Topic communication is applicable to the application scenarios related to data transmission that are constantly updated .
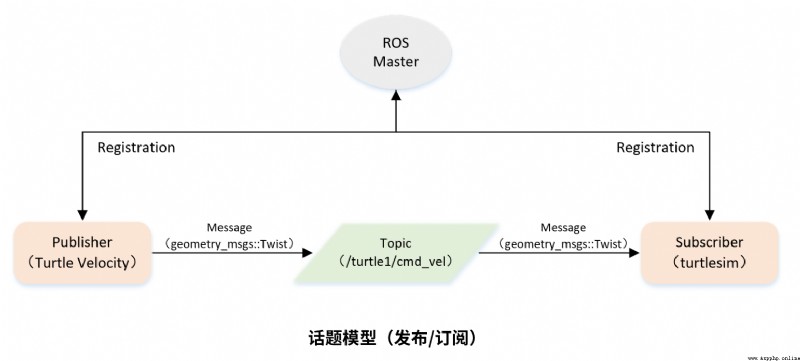
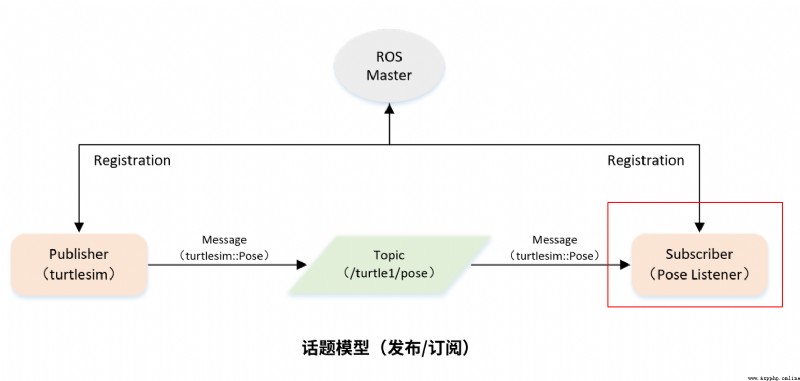
First, we need to implement the topic model shown in the following figure , The model is shown in the figure below , There are three roles involved in the model :
ROS Master ( managers )Talker ( Publisher )Listener ( subscriber )ROS Master Responsible for keeping Talker and Listener Registered information , And match the same topic Talker And Listener, help Talker And Listener Establishing a connection , After the connection is established ,Talker Can publish news , And the news will be Listener subscribe .
 among , The topic name node is
among , The topic name node is /turtle1/cmd_vel , The message types of publishers and subscribers are geometry_msgs::Twist .
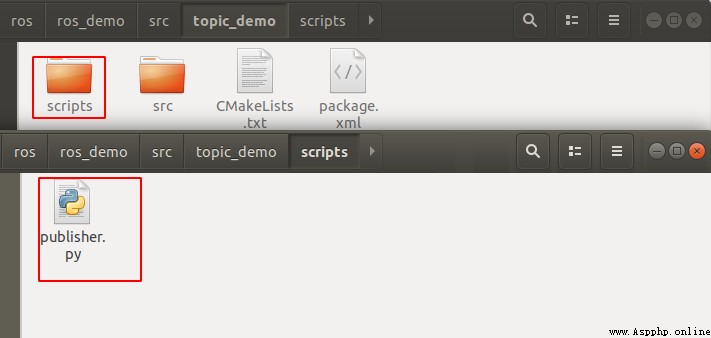
stay src Create a function package under the directory , Package name is topic_demo, The dependencies are rospy 、 std_msgs 、 geometry_msgs.
[email protected]:~/project/ros/ros_demo/src$ catkin_create_pkg topic_demo rospy std_msgs geometry_msgs
Output is as follows :
turtlesim Created file topic_demo/package.xml
Created file topic_demo/CMakeLists.txt
Created folder topic_demo/src
Successfully created files in /home/wohu/project/ros/ros_demo/src/topic_demo. Please adjust the values in package.xml.
Create a... Under the feature pack scripts Folder , stay scripts Create a in the file .py file .
publisher.py Code content :
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# The routine will publish turtle1/cmd_vel topic of conversation , Message type geometry_msgs::Twist
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS Node initialization
rospy.init_node('velocity_publisher', anonymous=True)
# Create a Publisher, The release is called /turtle1/cmd_vel Of topic, The message type is geometry_msgs::Twist, The queue length 10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# Set the frequency of the cycle
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# initialization geometry_msgs::Twist Type of message
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# Release the news
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# Delay according to the cycle frequency
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
$ chmod +x publisher.py
roscore start-up ROS service $ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun topic_demo publisher.py
rosrun Followed by the created package name topic_demo And publisher's files publisher.py
The demonstration results are as follows :
If an error is reported after operation :
$ rosrun topic_demo publisher.py
[rosrun] Couldn't find executable named publisher.py below /home/wohu/project/ros/ros_demo/src/topic_demo [rosrun] Found the following, but they're either not files,
[rosrun] or not executable:
[rosrun] /home/wohu/project/ros/ros_demo/src/topic_demo/scripts/publisher.py
[email protected]:~/project/ros/ros_demo/src$
explain publisher.py File permissions have not been modified .
 Same as before , In Feature Pack
Same as before , In Feature Pack topic_demo The directory src Store subscriber files in the directory

The subscriber code implements
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# This routine will subscribe to /turtle1/pose topic of conversation , Message type turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():
# ROS Node initialization
rospy.init_node('pose_subscriber', anonymous=True)
# Create a Subscriber, The subscription is called /turtle1/pose Of topic, Register callback function poseCallback
rospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# Loop waiting for callback function
rospy.spin()
if __name__ == '__main__':
pose_subscriber()
Open them in turn 3 Terminals execute the following commands :
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
Start the subscriber with the following command
$ rosrun topic_demo pose_subscriber.py
Pass on 、 Next 、 Left 、 Right Control turtle movement , And then you can see pose_subscriber.py The script outputs the turtle's location information .
Tested and verified ,publisher.py The code can also be placed in src Under the table of contents
After changing the script name, run the following command , It can also run .
$ rosrun topic_demo publisher_demo.py
 Django (II) exquisite blog construction (12) realize the comment function
Django (II) exquisite blog construction (12) realize the comment function
Preface This chapter focuses
 Computer graduation design Python+djang big data-based job-hunting system for fresh graduates (source code + system + mysql database + Lw document)
Computer graduation design Python+djang big data-based job-hunting system for fresh graduates (source code + system + mysql database + Lw document)
項目介紹隨著時代的發展,The number of coll