Harris:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384144
Shi-Tomasi:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384218
SIFT:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384278
SURF:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384513
優點:
(1)實時檢測;
FAST:可以做到特征點的實時檢測;
BRIEF:對已經檢測到的特征點進行描述;加快了特征描述符建立的速度,同時極大的降低了特征匹配的時間;
(1)創建orb對象;cv2.ORB_create()
(2)關鍵點檢測和特征匹配:kp,des=orb.detectAndCompute(gray,mask);
import os
import cv2
import numpy as np
img=cv2.imread('images/HaLiSi.jpg')
img=cv2.resize(src=img,dsize=(450,450))
gray=cv2.cvtColor(src=img,code=cv2.COLOR_BGR2GRAY)
#SIFT對象創建
orb=cv2.ORB_create()
#進行檢測,其中第二個參數為None,表示對整張圖進行檢測
kp=orb.detect(gray,None)
#進行特征匹配
# kp,des=surf.compute(gray,kp)
kp,des=orb.detectAndCompute(gray,None)
print(des)
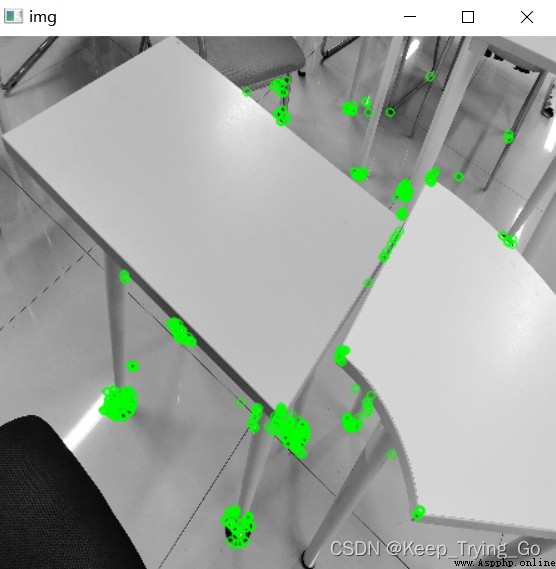
#繪制角點
cv2.drawKeypoints(image=gray,keypoints=kp,outImage=img,color=(0,255,0))
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')
 How does pandas change from one line to another (splicing and aggregating text)?
How does pandas change from one line to another (splicing and aggregating text)?
1. Scenario introduction Some
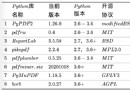 Python office automation: the strongest and most detailed PDF file operation manual in the whole network
Python office automation: the strongest and most detailed PDF file operation manual in the whole network
PDF(Portable Document Format)
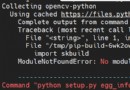 [valid in the personal test] when installing opencv Python in PIP, an error occurs modulenotfounderror: no module named skbuild‘
[valid in the personal test] when installing opencv Python in PIP, an error occurs modulenotfounderror: no module named skbuild‘
Error log Use pip install ope