Harris:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384144
Shi-Tomasi:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384218
SIFT:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384278
SURF:
https://blog.csdn.net/Keep_Trying_Go/article/details/125384513
advantage :
(1) real-time detection ;
FAST: It can achieve real-time detection of feature points ;
BRIEF: Describe the detected feature points ; It speeds up the establishment of feature descriptors , At the same time, the time of feature matching is greatly reduced ;
(1) establish orb object ;cv2.ORB_create()
(2) Key point detection and feature matching :kp,des=orb.detectAndCompute(gray,mask);
import os
import cv2
import numpy as np
img=cv2.imread('images/HaLiSi.jpg')
img=cv2.resize(src=img,dsize=(450,450))
gray=cv2.cvtColor(src=img,code=cv2.COLOR_BGR2GRAY)
#SIFT objects creating
orb=cv2.ORB_create()
# To test , The second parameter is None, Indicates to test the whole picture
kp=orb.detect(gray,None)
# Feature matching
# kp,des=surf.compute(gray,kp)
kp,des=orb.detectAndCompute(gray,None)
print(des)
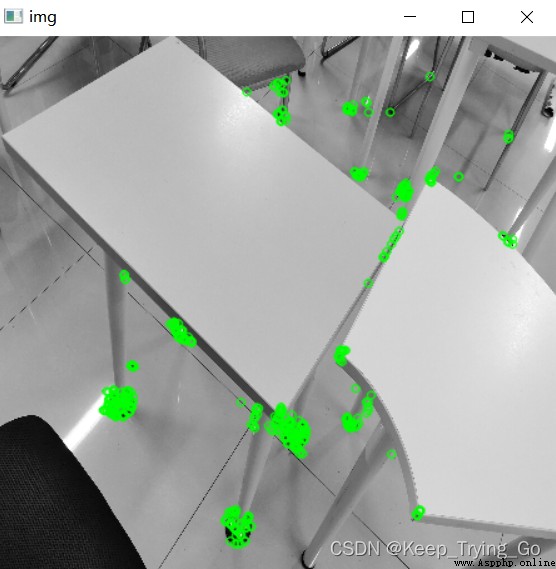
# Draw corners
cv2.drawKeypoints(image=gray,keypoints=kp,outImage=img,color=(0,255,0))
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')