本節時長需控制在15分鐘內
Linux下,可以通過設置socket使其變為non-blocking。當對一個non-blocking socket執行讀操作時,流程是這個樣子:
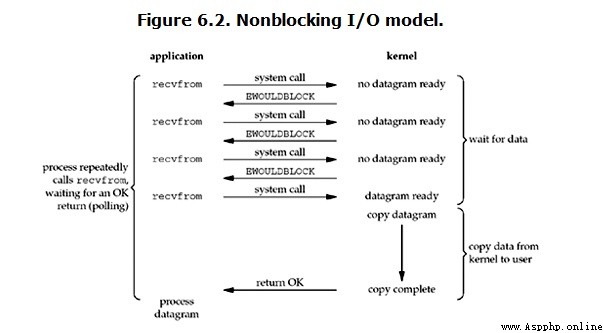
從圖中可以看出,當用戶進程發出read操作時,如果kernel中的數據還沒有准備好,那麼它並不會block用戶進程,而是立刻返回一個error。從用戶進程角度講 ,它發起一個read操作後,並不需要等待,而是馬上就得到了一個結果。用戶進程判斷結果是一個error時,它就知道數據還沒有准備好,於是用戶就可以在本次到下次再發起read詢問的時間間隔內做其他事情,或者直接再次發送read操作。一旦kernel中的數據准備好了,並且又再次收到了用戶進程的system call,那麼它馬上就將數據拷貝到了用戶內存(這一階段仍然是阻塞的),然後返回。
也就是說非阻塞的recvform系統調用調用之後,進程並沒有被阻塞,內核馬上返回給進程,如果數據還沒准備好,
此時會返回一個error。進程在返回之後,可以干點別的事情,然後再發起recvform系統調用。重復上面的過程,
循環往復的進行recvform系統調用。這個過程通常被稱之為輪詢。輪詢檢查內核數據,直到數據准備好,再拷貝數據到進程,
進行數據處理。需要注意,拷貝數據整個過程,進程仍然是屬於阻塞的狀態。
所以,在非阻塞式IO中,用戶進程其實是需要不斷的主動詢問kernel數據准備好了沒有。
非阻塞IO示例
#服務端
from socket import *
server = socket(AF_INET, SOCK_STREAM)
server.bind(('127.0.0.1',8099))
server.listen(5)
server.setblocking(False)
rlist=[]
wlist=[]
while True:
try:
conn, addr = server.accept()
rlist.append(conn)
print(rlist)
except BlockingIOError:
del_rlist=[]
for sock in rlist:
try:
data=sock.recv(1024)
if not data:
del_rlist.append(sock)
wlist.append((sock,data.upper()))
except BlockingIOError:
continue
except Exception:
sock.close()
del_rlist.append(sock)
del_wlist=[]
for item in wlist:
try:
sock = item[0]
data = item[1]
sock.send(data)
del_wlist.append(item)
except BlockingIOError:
pass
for item in del_wlist:
wlist.remove(item)
for sock in del_rlist:
rlist.remove(sock)
server.close()
#客戶端
from socket import *
c=socket(AF_INET,SOCK_STREAM)
c.connect(('127.0.0.1',8080))
while True:
msg=input('>>: ')
if not msg:continue
c.send(msg.encode('utf-8'))
data=c.recv(1024)
print(data.decode('utf-8'))
但是非阻塞IO模型絕不被推薦。
我們不能否則其優點:能夠在等待任務完成的時間裡干其他活了(包括提交其他任務,也就是 “後台” 可以有多個任務在“”同時“”執行)。
但是也難掩其缺點:
1\. 循環調用recv()將大幅度推高CPU占用率;這也是我們在代碼中留一句time.sleep(2)的原因,否則在低配主機下極容易出現卡機情況
2\. 任務完成的響應延遲增大了,因為每過一段時間才去輪詢一次read操作,而任務可能在兩次輪詢之間的任意時間完成。
這會導致整體數據吞吐量的降低。
此外,在這個方案中recv()更多的是起到檢測“操作是否完成”的作用,實際操作系統提供了更為高效的檢測“操作是否完成“作用的接口,例如select()多路復用模式,可以一次檢測多個連接是否活躍。
 Computer graduation design Python+djang enterprise it asset management system (source code + system + mysql database + Lw document)
Computer graduation design Python+djang enterprise it asset management system (source code + system + mysql database + Lw document)
項目介紹隨著時代的發展,IT企業也越來越多,相對應的ITEn
 Design and implementation of a personalized movie recommendation system based on Python
Design and implementation of a personalized movie recommendation system based on Python
Design and Implementation of a