經過本系列的上半部分JDK1.8 AbstractQueuedSynchronizer的實現分析(上)的解讀,相信很多讀者已經對AbstractQueuedSynchronizer(下文簡稱AQS)的獨占功能了然於胸,那麼這次我們通過對另一個工具類:CountDownLatch的分析來解讀AQS的另外一個功能:共享功能。
在開始解讀AQS的共享功能前,我們再重溫一下CountDownLatch,CountDownLatch為java.util.concurrent包下的計數器工具類,常被用在多線程環境下,它在初始時需要指定一個計數器的大小,然後可被多個線程並發的實現減1操作,並在計數器為0後調用await方法的線程被喚醒,從而實現多線程間的協作。它在多線程環境下的基本使用方式為:
//main thread
// 新建一個CountDownLatch,並指制定一個初始大小
CountDownLatch countDownLatch = new CountDownLatch(3);
// 調用await方法後,main線程將阻塞在這裡,直到countDownLatch 中的計數為0
countDownLatch.await();
System.out.println("over");
//thread1
// do something
//...........
//調用countDown方法,將計數減1
countDownLatch.countDown();
//thread2
// do something
//...........
//調用countDown方法,將計數減1
countDownLatch.countDown();
//thread3
// do something
//...........
//調用countDown方法,將計數減1
countDownLatch.countDown();
注意,線程thread 1,2,3各自調用 countDown後,countDownLatch 的計數為0,await方法返回,控制台輸入“over”,在此之前main thread 會一直沉睡。
可以看到CountDownLatch的作用類似於一個“欄柵”,在CountDownLatch的計數為0前,調用await方法的線程將一直阻塞,直到CountDownLatch計數為0,await方法才會返回,
而CountDownLatch的countDown()方法則一般由各個線程調用,實現CountDownLatch計數的減1。
知道了CountDownLatch的基本使用方式,我們就從上述DEMO的第一行new CountDownLatch(3)開始,看看CountDownLatch是怎麼實現的。
首先,看下CountDownLatch的構造方法:

和ReentrantLock類似,CountDownLatch內部也有一個叫做Sync的內部類,同樣也是用它繼承了AQS。
再看下Sync:

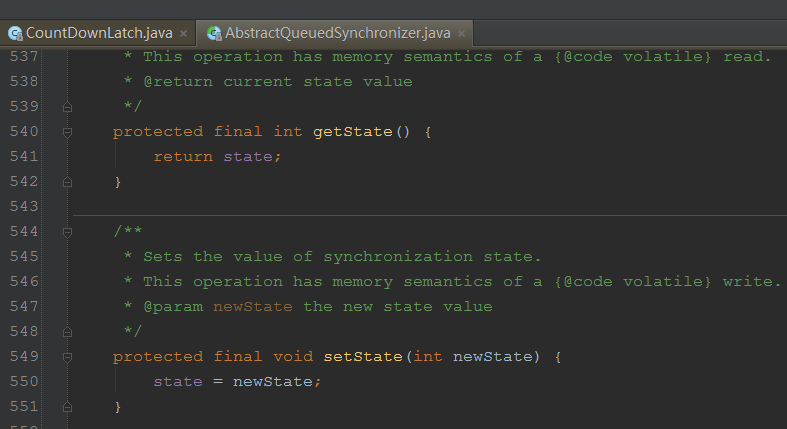
如果你看過本系列的上半部分,你對setState方法一定不會陌生,它是AQS的一個“狀態位”,在不同的場景下,代表不同的含義,比如在ReentrantLock中,表示加鎖的次數,在CountDownLatch中,則表示CountDownLatch的計數器的初始大小。
設置完計數器大小後CountDownLatch的構造方法返回,下面我們再看下CountDownLatch的await()方法:

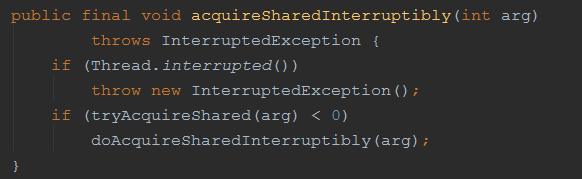
調用了Sync的acquireSharedInterruptibly方法,因為Sync是AQS子類的原因,這裡其實是直接調用了AQS的acquireSharedInterruptibly方法:
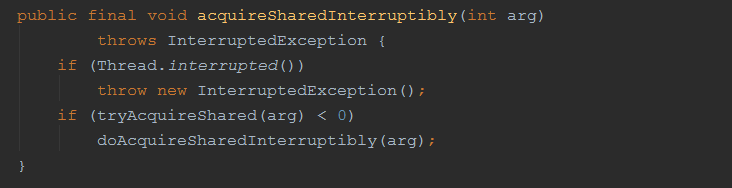
從方法名上看,這個方法的調用是響應線程的打斷的,所以在前兩行會檢查下線程是否被打斷。接著,嘗試著獲取共享鎖,小於0,表示獲取失敗,通過本系列的上半部分的解讀, 我們知道AQS在獲取鎖的思路是,先嘗試直接獲取鎖,如果失敗會將當前線程放在隊列中,按照FIFO的原則等待鎖。而對於共享鎖也是這個思路,如果和獨占鎖一致,這裡的tryAcquireShared應該是個空方法,留給子類去判斷:
再看看CountDownLatch:

如果state變成0了,則返回1,表示獲取成功,否則返回-1則表示獲取失敗。
看到這裡,讀者可能會發現, await方法的獲取方式更像是在獲取一個獨占鎖,那為什麼這裡還會用tryAcquireShared呢?
回想下CountDownLatch的await方法是不是只能在主線程中調用?答案是否定的,CountDownLatch的await方法可以在多個線程中調用,當CountDownLatch的計數器為0後,調用await的方法都會依次返回。 也就是說可以多個線程同時在等待await方法返回,所以它被設計成了實現tryAcquireShared方法,獲取的是一個共享鎖,鎖在所有調用await方法的線程間共享,所以叫共享鎖。
回到acquireSharedInterruptibly方法:
如果獲取共享鎖失敗(返回了-1,說明state不為0,也就是CountDownLatch的計數器還不為0),進入調用doAcquireSharedInterruptibly方法中,按照我們上述的猜想,應該是要將當前線程放入到隊列中去。
在這之前,我們再回顧一下AQS隊列的數據結構:AQS是一個雙向鏈表,通過節點中的next,pre變量分別指向當前節點後一個節點和前一個節點。其中,每個節點中都包含了一個線程和一個類型變量:表示當前節點是獨占節點還是共享節點,頭節點中的線程為正在占有鎖的線程,而後的所有節點的線程表示為正在等待獲取鎖的線程。如下圖所示:

黃色節點為頭節點,表示正在獲取鎖的節點,剩下的藍色節點(Node1、Node2、Node3)為正在等待鎖的節點,他們通過各自的next、pre變量分別指向前後節點,形成了AQS中的雙向鏈表。每個線程被加上類型(共享還是獨占)後便是一個Node, 也就是本文中說的節點。
再看看doAcquireSharedInterruptibly方法:
private void doAcquireSharedInterruptibly(int arg)
throws InterruptedException {
final Node node = addWaiter(Node.SHARED);
//將當前線程包裝為類型為Node.SHARED的節點,標示這是一個共享節點。
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head) {
//如果新建節點的前一個節點,就是Head,說明當前節點是AQS隊列中等待獲取鎖的第一個節點,
//按照FIFO的原則,可以直接嘗試獲取鎖。
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
//獲取成功,需要將當前節點設置為AQS隊列中的第一個節點,這是AQS的規則//隊列的頭節點表示正在獲取鎖的節點
p.next = null; // help GC
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) && //檢查下是否需要將當前節點掛起
parkAndCheckInterrupt())
throw new InterruptedException();
}
} finally {
if (failed)
cancelAcquire(node);
}
}
這裡有幾點需要說明的:
1. setHeadAndPropagate方法:
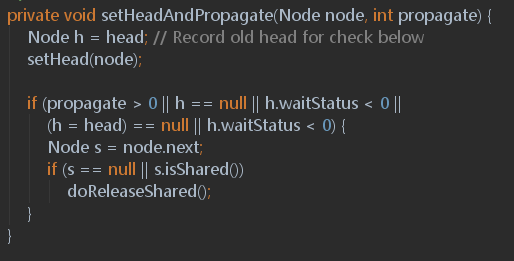
首先,使用了CAS更換了頭節點,然後,將當前節點的下一個節點取出來,如果同樣是“shared”類型的,再做一個"releaseShared"操作。
看下doReleaseShared方法:
for (;;) {
Node h = head;
if (h != null && h != tail) {
int ws = h.waitStatus;
if (ws == Node.SIGNAL) {
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
//如果當前節點是SIGNAL意味著,它正在等待一個信號,
//或者說,它在等待被喚醒,因此做兩件事,1是重置waitStatus標志位,2是重置成功後,喚醒下一個節點。
continue; // loop to recheck cases
unparkSuccessor(h);
}
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
//如果本身頭節點的waitStatus是出於重置狀態(waitStatus==0)的,將其設置為“傳播”狀態。
//意味著需要將狀態向後一個節點傳播。
continue; // loop on failed CAS
}
if (h == head) // loop if head changed
break;
}
為什麼要這麼做呢?這就是共享功能和獨占功能最不一樣的地方,對於獨占功能來說,有且只有一個線程(通常只對應一個節點,拿ReentantLock舉例,如果當前持有鎖的線程重復調用lock()方法,那根據本系列上半部分我們的介紹,我們知道,會被包裝成多個節點在AQS的隊列中,所以用一個線程來描述更准確),能夠獲取鎖,但是對於共享功能來說。
共享的狀態是可以被共享的,也就是意味著其他AQS隊列中的其他節點也應能第一時間知道狀態的變化。因此,一個節點獲取到共享狀態流程圖是這樣的:
比如現在有如下隊列:
當Node1調用tryAcquireShared成功後,更換了頭節點:
Node1變成了頭節點然後調用unparkSuccessor()方法喚醒了Node2、Node2中持有的線程A出於上面流程圖的park node的位置,
線程A被喚醒後,重復黃色線條的流程,重新檢查調用tryAcquireShared方法,看能否成功,如果成功,則又更改頭節點,重復以上步驟,以實現節點自身獲取共享鎖成功後,喚醒下一個共享類型節點的操作,實現共享狀態的向後傳遞。
2.其實對於doAcquireShared方法,AQS還提供了集中類似的實現:
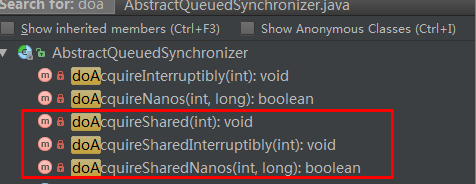
分別對應了:
帶參數請求共享鎖。 (忽略中斷)
帶參數請求共享鎖,且響應中斷。(每次循環時,會檢查當前線程的中斷狀態,以實現對線程中斷的響應)
帶參數請求共享鎖但是限制等待時間。(第二個參數設置超時時間,超出時間後,方法返回。)
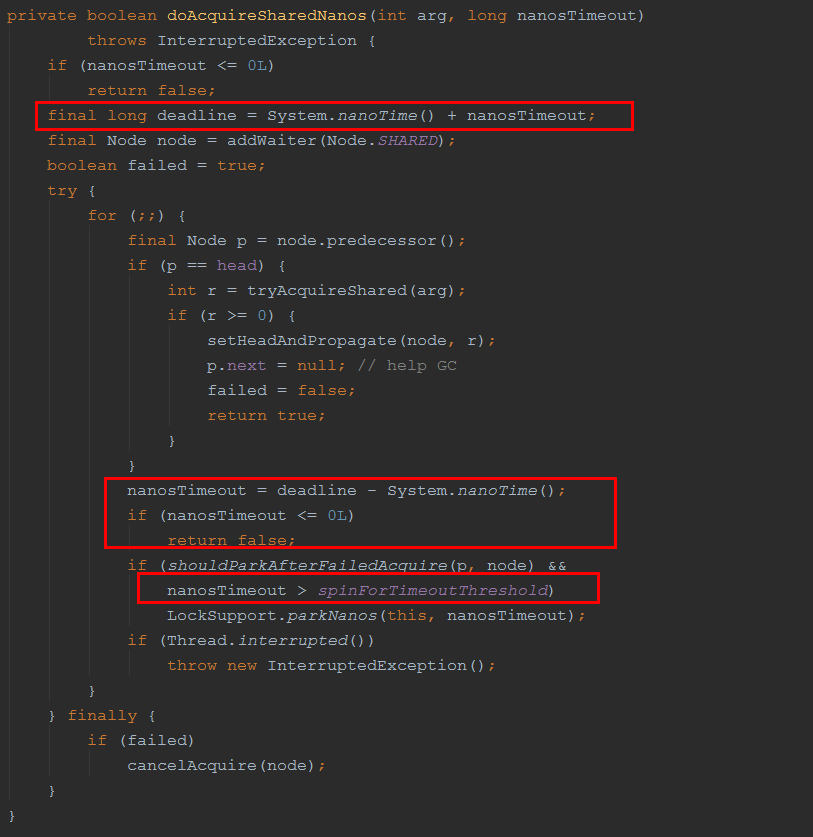
比較特別的為最後一個doAcquireSharedNanos方法,我們一起看下它怎麼實現超時時間的控制的。
因為該方法和其余獲取共享鎖的方法邏輯是類似的,我用紅色框圈出了它所不一樣的地方,也就是實現超時時間控制的地方。
可以看到,其實就是在進入方法時,計算出了一個“deadline”,每次循環的時候用當前時間和“deadline”比較,大於“dealine”說明超時時間已到,直接返回方法。
注意,最後一個紅框中的這行代碼:
nanosTimeout > spinForTimeoutThreshold
從變量的字面意思可知,這是拿超時時間和超時自旋的最小作比較,在這裡Doug Lea把超時自旋的阈值設置成了1000ns,即只有超時時間大於1000ns才會去掛起線程,否則,再次循環,以實現“自旋”操作。這是“自旋”在AQS中的應用之處。
看完await方法,我們再來看下countDown()方法:
調用了AQS的releaseShared方法,並傳入了參數1:
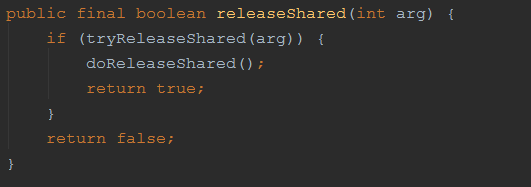
同樣先嘗試去釋放鎖,tryReleaseShared同樣為空方法,留給子類自己去實現,以下是CountDownLatch的內部類Sync的實現:
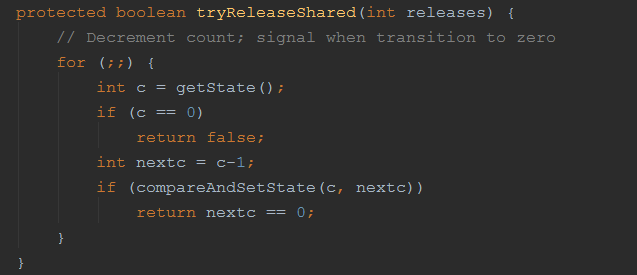
死循環更新state的值,實現state的減1操作,之所以用死循環是為了確保state值的更新成功。
從上文的分析中可知,如果state的值為0,在CountDownLatch中意味:所有的子線程已經執行完畢,這個時候可以喚醒調用await()方法的線程了,而這些線程正在AQS的隊列中,並被掛起的,
所以下一步應該去喚醒AQS隊列中的頭節點了(AQS的隊列為FIFO隊列),然後由頭節點去依次喚醒AQS隊列中的其他共享節點。
如果tryReleaseShared返回true,進入doReleaseShared()方法:
private void doReleaseShared() {
for (;;) {
Node h = head;
if (h != null && h != tail) {
int ws = h.waitStatus;
if (ws == Node.SIGNAL) {
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
//如果當前節點是SIGNAL意味著,它正在等待一個信號,
//或者說,它在等待被喚醒,因此做兩件事,1是重置waitStatus標志位,2是重置成功後,喚醒下一個節點。
continue; // loop to recheck cases
unparkSuccessor(h);
}
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
//如果本身頭節點的waitStatus是出於重置狀態(waitStatus==0)的,將其設置為“傳播”狀態。
//意味著需要將狀態向後一個節點傳播。
continue; // loop on failed CAS
}
if (h == head) // loop if head changed
break;
}
}
當線程被喚醒後,會重新嘗試獲取共享鎖,而對於CountDownLatch線程獲取共享鎖判斷依據是state是否為0,而這個時候顯然state已經變成了0,因此可以順利獲取共享鎖並且依次喚醒AQS隊裡中後面的節點及對應的線程。
本文從CountDownLatch入手,深入分析了AQS關於共享鎖方面的實現方式:
如果獲取共享鎖失敗後,將請求共享鎖的線程封裝成Node對象放入AQS的隊列中,並掛起Node對象對應的線程,實現請求鎖線程的等待操作。待共享鎖可以被獲取後,從頭節點開始,依次喚醒頭節點及其以後的所有共享類型的節點。實現共享狀態的傳播。
這裡有幾點值得注意:
與AQS的獨占功能一樣,共享鎖是否可以被獲取的判斷為空方法,交由子類去實現。
與AQS的獨占功能不同,當鎖被頭節點獲取後,獨占功能是只有頭節點獲取鎖,其余節點的線程繼續沉睡,等待鎖被釋放後,才會喚醒下一個節點的線程,而共享功能是只要頭節點獲取鎖成功,就在喚醒自身節點對應的線程的同時,繼續喚醒AQS隊列中的下一個節點的線程,每個節點在喚醒自身的同時還會喚醒下一個節點對應的線程,以實現共享狀態的“向後傳播”,從而實現共享功能。
以上的分析都是從AQS子類的角度去看待AQS的部分功能的,而如果直接看待AQS,或許可以這麼去解讀:
首先,AQS並不關心“是什麼鎖”,對於AQS來說它只是實現了一系列的用於判斷“資源”是否可以訪問的API,並且封裝了在“訪問資源”受限時將請求訪問的線程的加入隊列、掛起、喚醒等操作, AQS只關心“資源不可以訪問時,怎麼處理?”、“資源是可以被同時訪問,還是在同一時間只能被一個線程訪問?”、“如果有線程等不及資源了,怎麼從AQS的隊列中退出?”等一系列圍繞資源訪問的問題,而至於“資源是否可以被訪問?”這個問題則交給AQS的子類去實現。
當AQS的子類是實現獨占功能時,例如ReentrantLock,“資源是否可以被訪問”被定義為只要AQS的state變量不為0,並且持有鎖的線程不是當前線程,則代表資源不能訪問。
當AQS的子類是實現共享功能時,例如:CountDownLatch,“資源是否可以被訪問”被定義為只要AQS的state變量不為0,說明資源不能訪問。
這是典型的將規則和操作分開的設計思路:規則子類定義,操作邏輯因為具有公用性,放在父類中去封裝。
當然,正式因為AQS只是關心“資源在什麼條件下可被訪問”,所以子類還可以同時使用AQS的共享功能和獨占功能的API以實現更為復雜的功能。
比如:ReentrantReadWriteLock,我們知道ReentrantReadWriteLock的中也有一個叫Sync的內部類繼承了AQS,而AQS的隊列可以同時存放共享鎖和獨占鎖,對於ReentrantReadWriteLock來說分別代表讀鎖和寫鎖,當隊列中的頭節點為讀鎖時,代表讀操作可以執行,而寫操作不能執行,因此請求寫操作的線程會被掛起,當讀操作依次推出後,寫鎖成為頭節點,請求寫操作的線程被喚醒,可以執行寫操作,而此時的讀請求將被封裝成Node放入AQS的隊列中。如此往復,實現讀寫鎖的讀寫交替進行。
而本系列文章上半部分提到的FutureTask,其實思路也是:封裝一個存放線程執行結果的變量A,使用AQS的獨占API實現線程對變量A的獨占訪問,判斷規則是,線程沒有執行完畢:call()方法沒有返回前,不能訪問變量A,或者是超時時間沒到前不能訪問變量A(這就是FutureTask的get方法可以實現獲取線程執行結果時,設置超時時間的原因)。
綜上所述,本系列文章從AQS獨占鎖和共享鎖兩個方面深入分析了AQS的實現方式和獨特的設計思路,希望對讀者有啟發,下一篇文章,我們將繼續JDK 1.8下 J.U.C (java.util.concurrent)包中的其他工具類,敬請期待。






