摘要 提出一種適用於嵌入式系統的模塊動態加載技術,設計實現簡單,占用資源少,開銷小,並且成功運用於DeltaOS.可提高系統的靈活性和擴屬性.介招加載與動態鏈接的原理和應用情況,解釋相關術語,描述基本設計思路:詳細說明該技術的核心。即模塊聲明、調用庫、兩級重定位表,最後給出結論。 關鍵詞 模塊 動態加栽 嵌入式系統DeltaOS
引 言
隨著電子技術的飛速發展,嵌人式設備應用越來越廣泛,復雜度也越來越高。這使得硬件和軟件設計比例發生了很大變化,軟件開發的比重越來越大。然而傳統嵌入式開發過程中需要將應用與操作系統編譯鏈接成一個整體,然後下載到目標機上運行。如果在調試過程中發現問題,需要重新編鏈接然後重復下載運行的過程。這樣的開發流程周期長而且繁瑣,已經越來越不適應快速市場化的需要。
為了適應多樣化的嵌入式應用和加快嵌入式系統的開發過程,除了需要可靠的基礎平台軟件的支持,如帶有文件系統、網絡協議棧的RTOS和配套的集成開發環境,更重要的是需要可以動態擴展的系統平台。近年來,新一代的嵌入式操作系統已經開始使用動態擴展技術:將基本系統(包括操作系統以及其他共享功能調用庫)和應用程序開發分開處理,支持模塊更新和動態加載技術。很多主流的傳統嵌入式操作系統廠商,如windRiver、Green HilIs、Lynxworks,都推出了面向航空航天、基礎通信設備等領域的高可靠、高性能的RTOS版本,支持應用和系統組件的動態加載和更新;而在消費電子領域,相關的操作系統廠商,如symbian、Palm、Microsoft,更是積極推出了具有相應功能的操作系統,在新一代移動設備上得到了廣泛應用。
為了成為可動態擴展系統平台,大部分嵌入式操作系統需要使用動態加載技術。總的來說,動態加載是指應用或者系統在運行過程中需要使用某模塊的服務,於是通過一系列預定的動作將指定模塊加載到系統中,讓調用者繼續順利工作。它實現的關鍵就是加載與動態鏈接技術。因為加載和動態鏈接互相依賴,關系緊密,所以將兩者放在一起進行討論。
1 加載與動態鏈接機制
加載主要負責將模塊程序從二級存儲設備(比如硬盤或者Flash)搬移到指定內存空間,並且將模塊交由系統加載器統一管理。
程序鏈接分為靜態鏈接、加載時鏈接和運行時鏈接。靜態鏈接就是將程序和它運行所需的全部庫鏈接成一個執行文件。它的優點是可以獨立運行、速度快,但是它鏈接生成的代碼尺寸比較大。加載時鏈接是指程序在編譯鏈接時不會把它用到的庫鏈接到執行程序中,而是在它被加載器加載時才解析執行文件,依次把用到的庫裝載到系統中讓其運行。它的優點是程序本身代碼量減小,但運行時程序占的內存並沒有減小,同時增加了加載器的工作量。動態鏈接是加載時鏈接的進一步發展,它是指將庫的加載過程延遲到程序運行時執行。這種方式不會給程序引入額外的代碼,也不會增加加載器的開銷,只有當應用真正使用某庫時才會加載該庫,減少了不必要的空間占用。它的缺點是可能會有一些運行開銷。
嵌入式系統中動態加載和普通的動態鏈接概念類似,但是嵌入式系統中的加載鏈接器有其自身的特點:它是交叉加載,主機端做一部分工作,比如程序的重定位,執行文件的解析等等;而目標機端相對簡單,主要做模塊搜索定位和空間分配,以及指定物理地址或者映射虛擬地址讓其運行。一部分嵌入式系統不支持虛擬內存,應用和內核共享存儲空間。當系統加載了多個應用到系統中時,一般需要使用overlap技術來解決內存空間有限的問題,即是當多個應用的運行地址空間沖突時,加載器會凍結當前暫時不運行的應用,讓新加載的應用使用指定的地址空間,PairnOS中就采用了這樣的設計。對於支持虛擬內存的嵌入式系統,加載器的工作被大大簡化,每個應用都有可以運行在同樣的虛擬的空間,不需要加載器為其重定位或使用overlap技術,因此提高了工作效率。Vxworks6.O,WinCE都使用了這種設計。兩種方式在不同的領域都有比較多的應用。
文中提出的模塊動態加載技術是基於支持MMU(Memory Management Unit)的32位嵌入式操作系統,采用了加載與動態鏈接技術。使用該技術構建的嵌人式系統面向高端市場,特別是對系統可靠性、安全性要求很高的領域。在DeltaOS新一代高可靠的版本HAR(High Available Reliable system)的研發過程中,即成功地實現了基於該設計的加載器LambdaLoader,達到了預期的性
能要求。
2 模塊動態加載的設計
2.1 設計思路
首先定義一些概念:模塊、目標程序、接口函數地址表和調用庫(call Library)。
①模塊,主要是指加載器加載的一個單位,並且這裡模塊的概念主要是強調它是為應用或者系統提供一系列服務的提供者。
②目標程序,是指模塊的使用者。它可以是應用,也可以是另一個模塊。
③接口函數地址表(文中也稱之為模塊重定位表),指在模塊中有一個數組表,該數組表的內容是該模塊對外提供的函數接口的地址。
④調用庫,是供模塊調用者鏈接使用的專有庫。它與相關模塊一一對應,將封裝了的模塊接口供目標程序使用。除此以外,它還有一個運行時才確定的模塊重定位表地址指針和模塊動態查找定位的代碼。
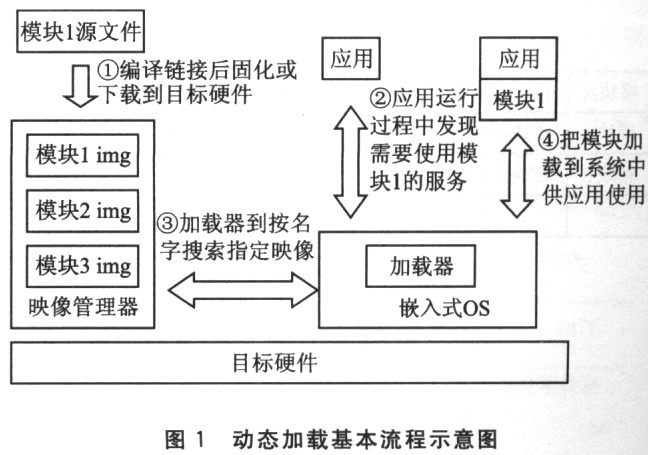
如果在系統中要實現動態加載,首先需要一種模塊定位機制,使得調用者能夠在系統中動態定位需要的模塊,其次是要能讓模塊與目標程序動態的關聯在一起,協調工作。為了解決這些問題,需要一系列相關的設計:規定模塊的聲明方式;簡化目標機端模塊地址空間定位的工作;重定位表的機制等等。基於這樣的設計,系統可以比較順利地實現動態加載。模塊動態加載的工作流程如圖l所示。這裡描述的主要是目標機端的工作。
2.2 模塊的聲明
模塊首先要定義它的相關屬性。這裡使用模塊聲明文件來完成這個工作。模塊聲明文件中需要定義:模塊名字、版本、對外提供的API接口。在系統編譯模塊程序後,會調用一系列的script代碼。這些script會根據模塊名字查找模塊對應的模塊聲明文件,並根據該文件生成供模塊調用者使用的調用庫和與模塊一起鏈接的附加庫。 附加庫包含系統後台通過調用script生成的接口函數地址表和模塊注冊函數。在每個模塊的初始化函數中,會調用一個模塊的注冊函數(該函數主要工作是向系統注冊模塊的名字和接口函數地址表地址)。當模塊被加載時,初始化函數會被系統調用,向系統注冊模塊信息,此後模塊交由加載器統一管理。
2.3 調用庫
每個模塊在提供一個模塊重定位表的同時,必須提供一個與之對應的模塊調用庫。別的目標程序必須並且只能通過調用庫來使用這個模塊提供的服務。每個調用庫都有一個存儲本模塊重定位表的地址指針變量。該變量在模塊被目標程序第一次使用時會被初始化為相應模塊重定位表地址。
在模塊第一次被目標程序使用即開始動態加載過程時,首先運行的是調用庫的庫初始化代碼(Library initialcode),它通過指定的系統調用來初始化庫中的模塊重定位表基地址指針。此後每次目標程序使用模塊提供的函數接口時,都通過以下公式得到該接口的實際地址:模塊接口實際地址=模塊重定位表基地址+函數index×4
在該公式中,函數index是指對應函數在模塊重定位表中的數組下標值。因為根據模塊聲明文件生成的調用庫中已經包含了每個函數的索引信息(index),同時在32位系統中需要乘以4得到准確的偏移量,所以當調用庫中重定位表地址被初始化後,可以通過這樣一個簡單計算得到指定接口實際地址,完成函數調用。
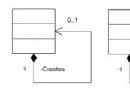
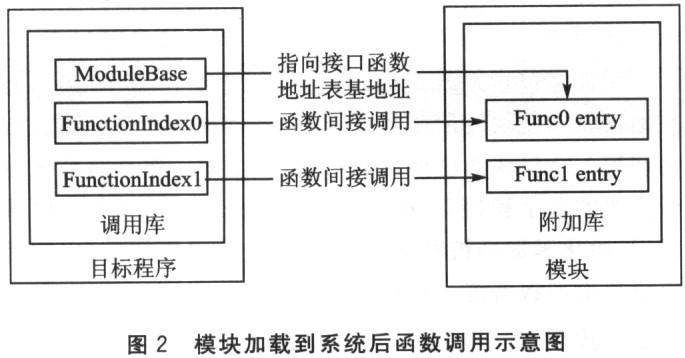
當一個目標程序使用了模塊,並正確動態加載後,其關系如圖2所示。目標程序中鏈接了調用庫,包含了函數跳轉表和指向模塊重定位表基地址的指針(ModuleBase);模塊中則鏈接了附加庫,包含了函數接口地址表(模塊重定位表)。調用模塊函數時,經過動態加載模塊的過程以後,目標程序的模塊重定位表基址指針指向了對應模塊的函數接口表,然後函數調用就可以順利進行了。
2.4 兩級重定位表
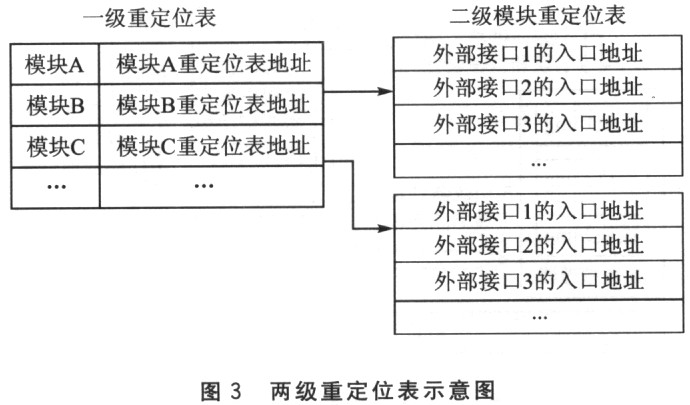
在嵌入式領域,為了降低性能開銷和增加確定性,目標機端加載器不會做程序重定位,而將相關工作在主機端完成,所以目標機端加載的所有程序都是絕對定位後的程序.為了實現系統動態擴展,必須使各個模塊能夠單獨鏈接生成執行程序,並且運行時不用關心彼此的定位,這樣即使一個模塊被動態替換後也能同其他程序一起協調運行。這裡通過兩級重定位表機制來完成這個協調性的工作。 對於內核、操作系統組件模塊或提供服務給其他目標程序使用的模塊,要維護一張本模塊提供的接口函數地址表(即模塊重定位表,這裡稱之為二級重定位表)。為了保證本模塊的向後兼容性,模塊必須保證其接口函數在模塊重定位表中的相對位置固定。即使今後不能提供這個接口函數,也需要將其保留,以保證同以前版本的二進制兼容性。
在模塊的初始化代碼中,模塊通過系統調用向加載器注冊這個模塊重定位表的地址,注冊時需提供模塊名和模塊重定位表的地址。加載器中管理著一個稱為一級重定向表的表格。這個表的表項是“模塊名”到“模塊重定位表地址”的映射。因為這只是一個映射關系,所以各個模塊對應的表項在一級表中的具體位置是可以改變的。
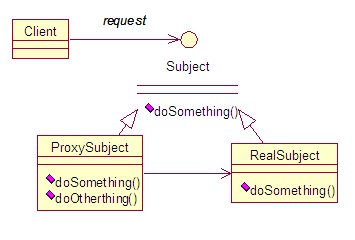
二級重定位表如圖3所示。
使用兩級重定位表的規則如下:
(1)模塊可通過模塊重定位表向其他目標程序提供接口函數;
(2)目標程序要使用別的模塊提供的接口函數必須通過對應模塊的調用庫來實現;
(3)目標程序在使用別的模塊提供的接口函數之前,必須通過加載器提供的系統調用服務獲取對應模塊重定位表來基地址初始化對方的調用庫。